



















Turtlebot与Matlab入门教程-网络配置
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
说明:
- 介绍如何网络配置
步骤:
- 虚拟机配置为桥接模式(Bridge),并勾选下面的“复制主机连接状态”(Replicate physical network connection state)

-
小车Turtlebot,假设ip地址为:192.168.0.93
-
虚拟机Windows运行matlab 2016b,假设ip地址为:192.168.0.197
-
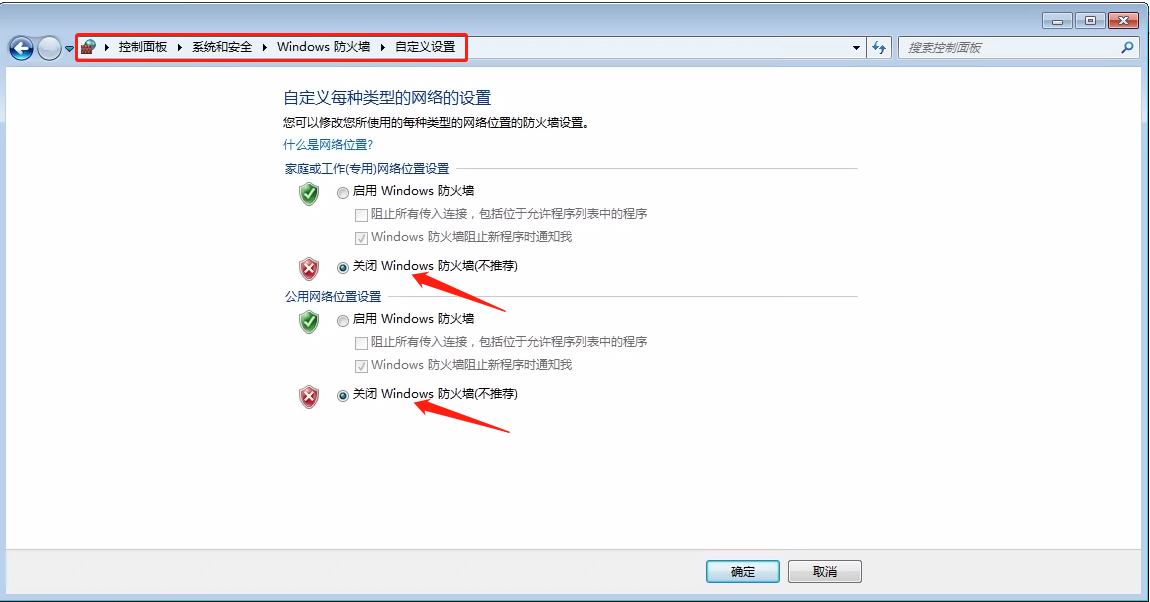
Windows需要关闭防火墙
检查网络:
-
检查Windows与Ubuntu网络是否联通,将两主机置于同一子网内
-
在PC的终端命令行:
ping 192.168.0.93- 在turtlebot端命令行:
ping 192.168.0.197- 要互相都能ping通,确认是否关闭防火墙,不会对通讯造成影响
配置主从信息:
- 小车turtlebot为主机,matlab为从机 做测试
- 在turtlebot端:
vim ~/.bashrc- 修改内容如下:
export ROS_MASTER_URI=http://192.168.0.93:11311
export ROS_HOSTNAME=192.168.0.93- 在matlab端脚本文件配置
function connection_turtlebot3()
ip_robot = '192.168.0.93';
rosinit(ip_robot, 'NodeHost', '192.168.0.197')
end- ip_robot以小车为主机的ip
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号