



















autolabor2.5入门教程-组装
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
autolabor2.5入门教程-组装
说明:
- 介绍autolabor2.5如何组装
硬件清单:
- 清单:
名称 数量
车体 1个
轮胎 4个
激光雷达 1个
激光雷达底座 1个
盖板 1个
充电器 1个
SD卡 1个
读卡器 1个
工具 1套步骤:
-
安装轮胎
-
将轮胎套入车轴后,利用附带的六角扳手锁紧联轴器. 如下图

-
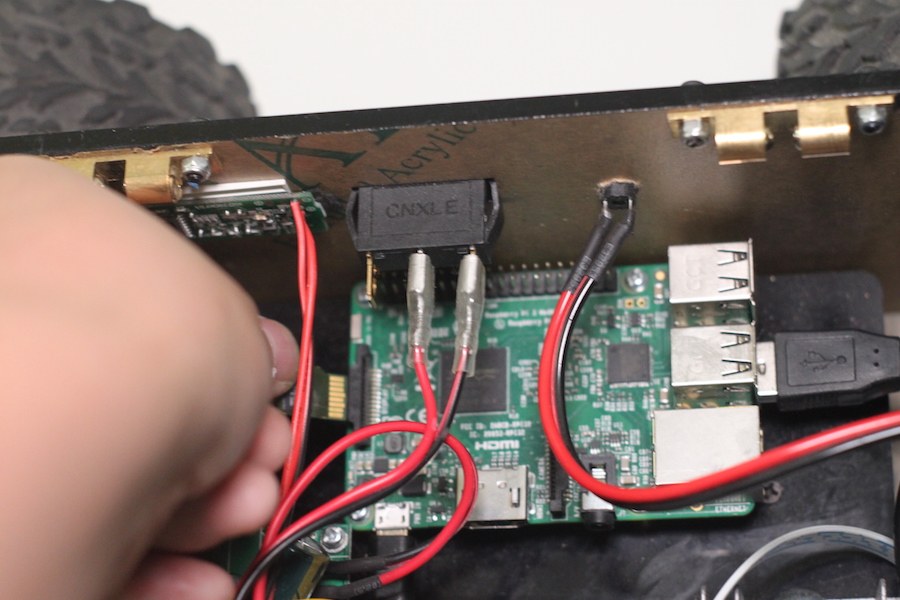
安装SD卡
-
随机会附带1张SD卡和1个读卡器,在蓝色袋子中.其中SD卡已经烧录好最新版本AutolaborOS
-
我们将卡安装到机器人内的树莓派上
-
注意SD卡金属面向上
-
安装好如下图

-
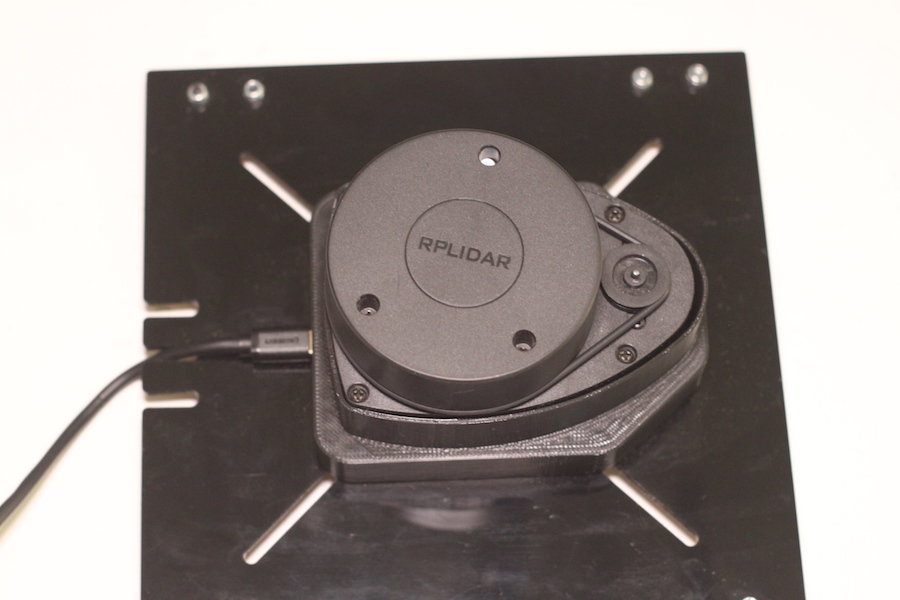
组装雷达
-
使用随机附带的螺丝(在雷达的背面),将雷达和面板安装在一起
-
注意雷达马达所在方向为正方向,尾部USB线指向过线槽
-
反面

- 安装面板
- 将雷达组装好后,将USB插在树莓派USB插口上
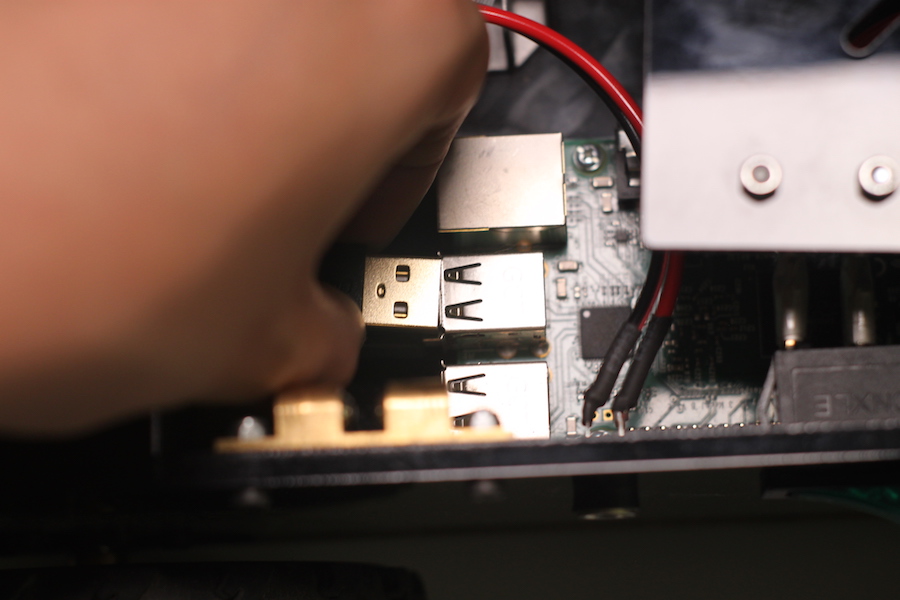
- 然后将盖板扣上,注意将雷达正方向对齐车体正方向,否则导航功能会出现异常

纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号