



















autolabor2.5入门教程-介绍
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
autolabor2.5入门教程-介绍
说明:
- 介绍autolabor2.5
产品购买:
Autolabor2.5介绍:
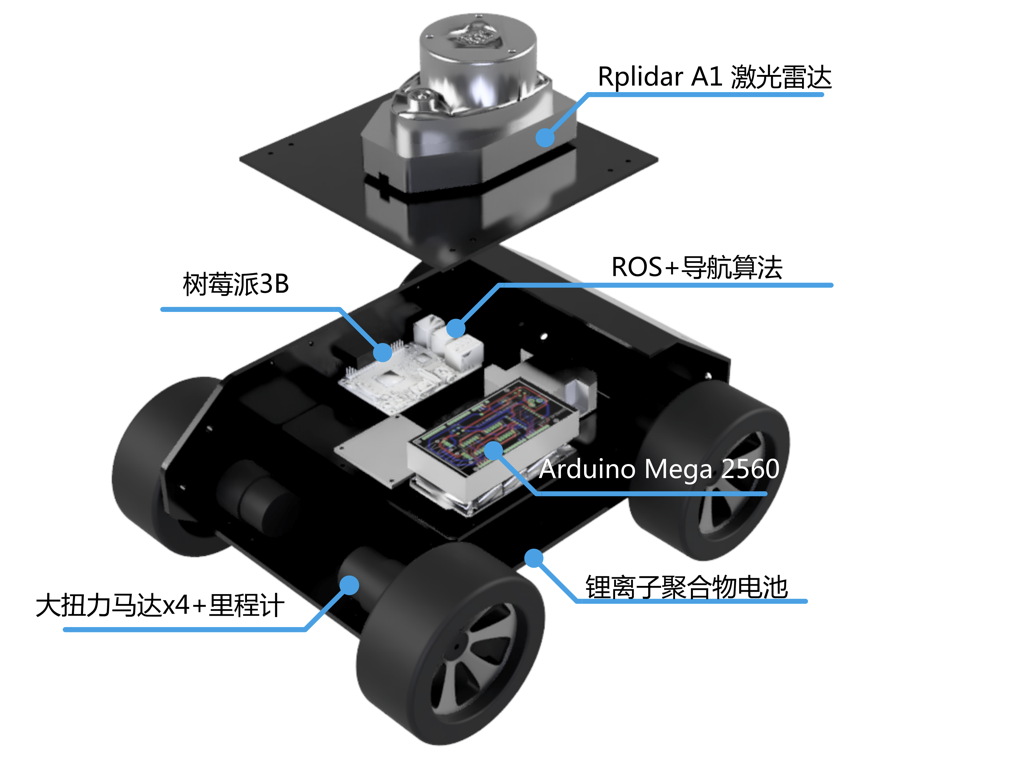
- Autolabor2.5 是一款基于ROS的开源机器人,车体采用5mm加厚黑色亚克力材质, 具有比较高机械强度,配合大扭力的四轮驱动系统,可以最高提供8KG的载重能力。
- 在硬件上采用Raspberry Pi 3b开发板为核心处理单元,其提供的4个USB接口可以方便搭载各种传感器设备。
- Autolabor2.5配有rplidar A1改进版激光雷达,12米半径扫描范围,可实现SLAM导航应用。
- 移动部分采用Arduino Mega 2560开发板,搭载PID算法结合马达上的霍尔传感器,可以精确控制轮胎旋转速度,同时Arduino还会提供ROS系统所需要的里程计信息。
- 驱动部分采用双路180W大功率驱动器,单路可以提供最大80W驱动能力,具有较大的驱动冗余,如有需要可以通过更换车体、替换马达实现更高载重的应用, 无需对软件进行任何修改。
- Autolabor 2.5 内置 Autolabor OS 系统,可以方便使用App进行遥控构图导航。
产品参数:
| 车体材质 | 加厚亚克力 |
| 尺寸 | 30cm*35cm |
| 自重 | 4kg |
| 载重 | 8kg |
| 最大速度 | 0.25m/s |
| 电池容量 | 12.6V 6800mAh |
| 遥控方式 | WIFI |
| 驱动方式 | 四轮驱动 差速转向 |
| 板载计算机 | 树莓派 3B |
| SD卡 | 32G 高耐久度 |
| 主控板 | Arduino Mega 2560 |
| 雷达型号 | rplidar A1改进版 |
| 电机 | 3W*4 12V直流 |
| 里程计 | 11线*168减速比编码器 |
| 内置软件 | AutolaborOS |
| Autolabor Remote App |
产品图片:

纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号