



















四旋翼那些事-04.飞控姿态控制台架试验(Roll Pitch)
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
四旋翼那些事-04.飞控姿态控制台架试验(Roll Pitchs)
说明:
- 本教程介绍飞控开发中的飞行姿态控制台架测试
飞控姿态控制台架试验
- 做飞控开发时,必须经历的一步,就是飞行姿态控制台架测试

-
上图就是我们(WalkAnt & A'bel)自制的姿态测试台架,只需要一根光轴和两个轴支座就可以将飞行器简单固定住
-
飞行器只能绕着横梁旋转,通过此试验台可以对roll、pitch的控制特性分别进行测试
-
在飞控自稳飞行之前,都需要在这个台架上对Roll、Pitch的内环(速度闭环)、外环(位置闭环)进行反复的调试,直到性能非常稳定以后,才可会给它解绑,让它飞向天空
-
以下仅以 roll 角为例进行性能分析,pitch测试类同
- Roll 内环测试
-
roll角控制分为外环和内环,内环为速度跟踪环,外环为位置跟踪环
-
调试时,一般先将内环跟踪调试好,再调试外环
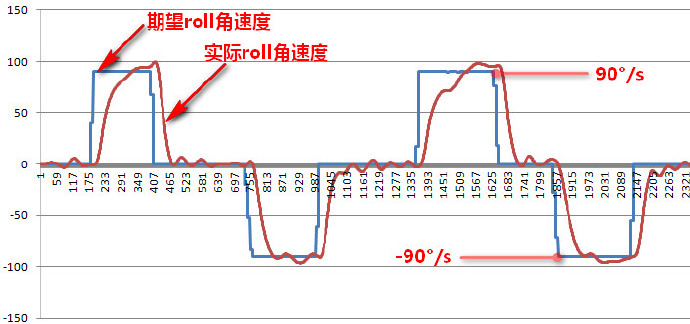
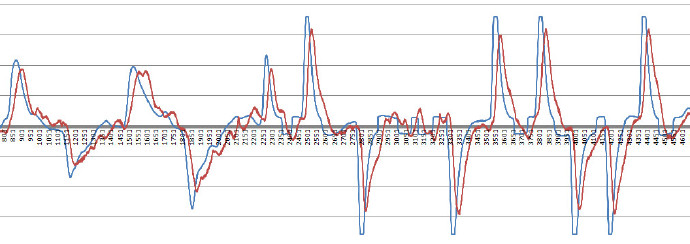
- 以下是roll角内环测试时的速度跟踪曲线(目标跟踪速度正负90°/s)
-
上图我们发现当给定一个期望角速度,实际角速度从0°/s上升到90°/s花费的时间大约为350ms
-
这个跟踪时间稍微有点长,这个有待进一步优化
-
同时通过上图发现角速度往正向跟踪时稍显缓慢,这和试验测试的场景有一定的关系,试验测试场景描述如下:
-
正向运转测试时,飞行器roll角从-60°经过0°(水平位置)再到+60°位置停下
- 反向运转测试时,飞行器roll角从+60°经过0°(水平位置)再到-60°位置停下
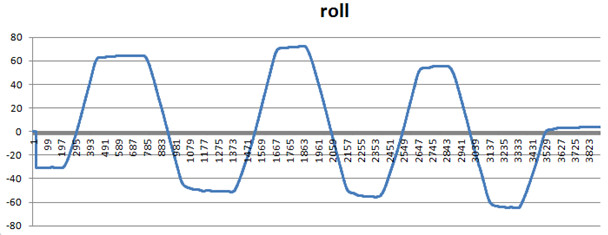
-
上图为roll角的变化曲线,基本上roll角的变化斜率(速率)是一定的
-
由于roll角变化角度非常大,以至于飞行器重心波动非常大,所以给速度跟踪带来了一定影响
-
下图为速度跟踪时记录的系统阻尼曲线
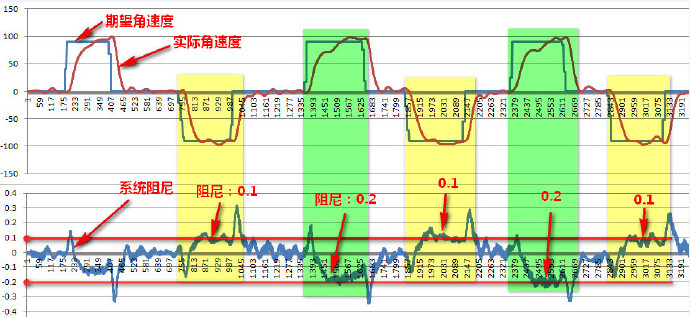
-
我们发现正向运动时阻尼大概是0.2,反向运转时阻尼为0.1
-
这导致正向运转跟踪速度受到一定的影响
- roll外环测试
- 以下是roll外环测试的曲线(目标跟踪角度正负45°)
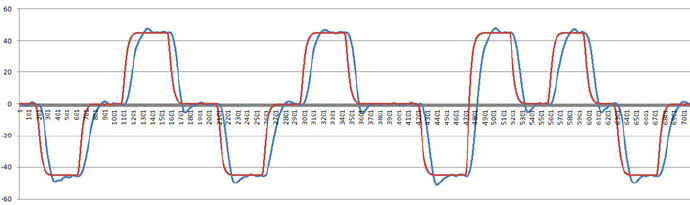
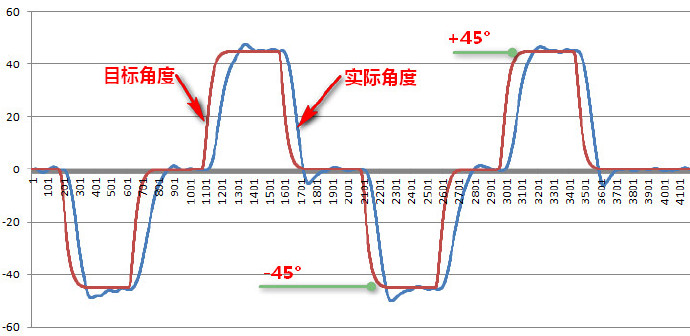
-
上图我们可以看到,roll角跟踪非常良好,正向跟踪最大2.4°的超调,反向跟踪时最大5°的超调
-
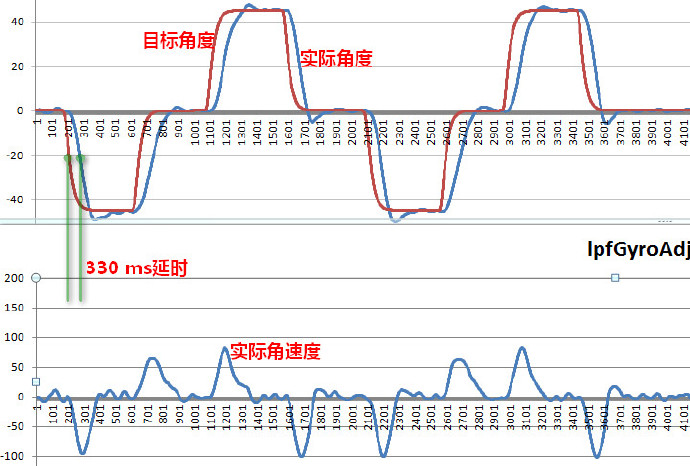
下图是角速度的曲线,同时可以看到角度跟踪延时有330ms
-
这个延时与前面提到的350ms角速度延时基本一致,这个是需要进一步优化的
- 电机特性分析
-
在最初开发阶段,我们对飞行器响应特性进行了测试
-
测试时发现电调、电机的综合响应性能并不理想
-
以下是我们实验记录的一组指令扭矩与电机角速度响应曲线
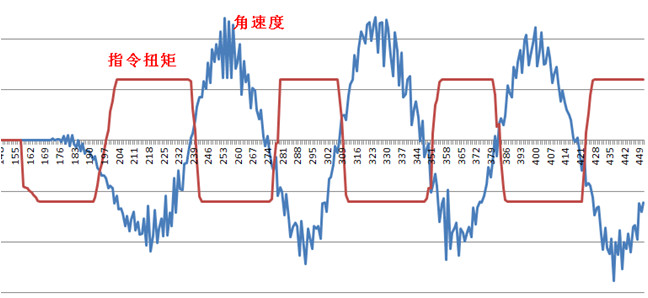
-
我们每5ms采集一个点,从上图曲线中我们发现电机角速度相对指令扭矩之间有100ms左右的相位延时
-
通过多次实验,我们最终确定该电机、电调和螺旋桨的综合响应延时时间100ms,惯性时间常数约40ms(响应频率4hz)
-
这个参数指标有点让人意外,这样的特性严重降低了我们控制调节的带宽和频率
-
关于电机、电调准确延时时间,我暂时还没有做非常严格的测试,严格的测试需要用到我们前不久制作的无刷电机拉力测试台,请参考我的另外一篇文章:http://blog.sina.com.cn/s/blog_402c071e0102wyji.html
-
由于受现有电调固有特性的限制,电调的调节频率目前为50hz
-
我们的姿态控制算法运行在200hz频率下,实际电机指令输出频率50hz
- 另附一组数据(2017年1月9日更新)
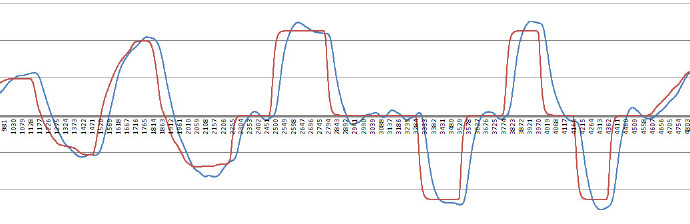
- 这是Pitch角的测试结果,下图包含了目标角速度与目标角度的跟踪结果
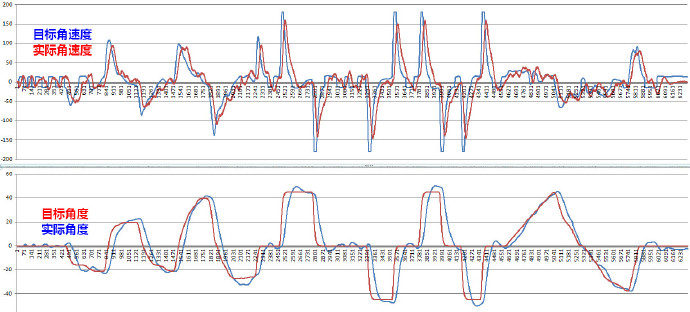
- 下图为内环(角速度跟踪)
- 下图为外环(角度跟踪)
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号