



















TurtleBot4快速入门教程-远程PC安装
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot4交流群,微信扫描右侧二维码立即进群交流

TurtleBot4快速入门教程-远程PC安装
说明:
- 本教程主要介绍如何远程PC安装相关的软件
相关设备
- Turtlebot4机器人套件:采购地址
安装操作系统
-
TurtleBot4默认使用Ubuntu 20.04 LTS (Focal Fossa)操作系统
-
操作系统安装教程:Ubuntu系统入门教程-安装ubuntu20.04
安装ROS2 Galactic Desktop
-
方式一:使用
ROS命令管理器快速安装 -
首先安装
ROS命令管理器
$ rm online.sh ; wget https://gitee.com/ncnynl/commands/raw/master/online.sh ; sudo chmod +x ./online.sh; ./online.sh- 启动
ROS命令管理器
$ commands- 从下方目录栏选择
ros2目录,导入install_ros2_galactic.json和config_ros2_galatic_to_bashrc.json文件
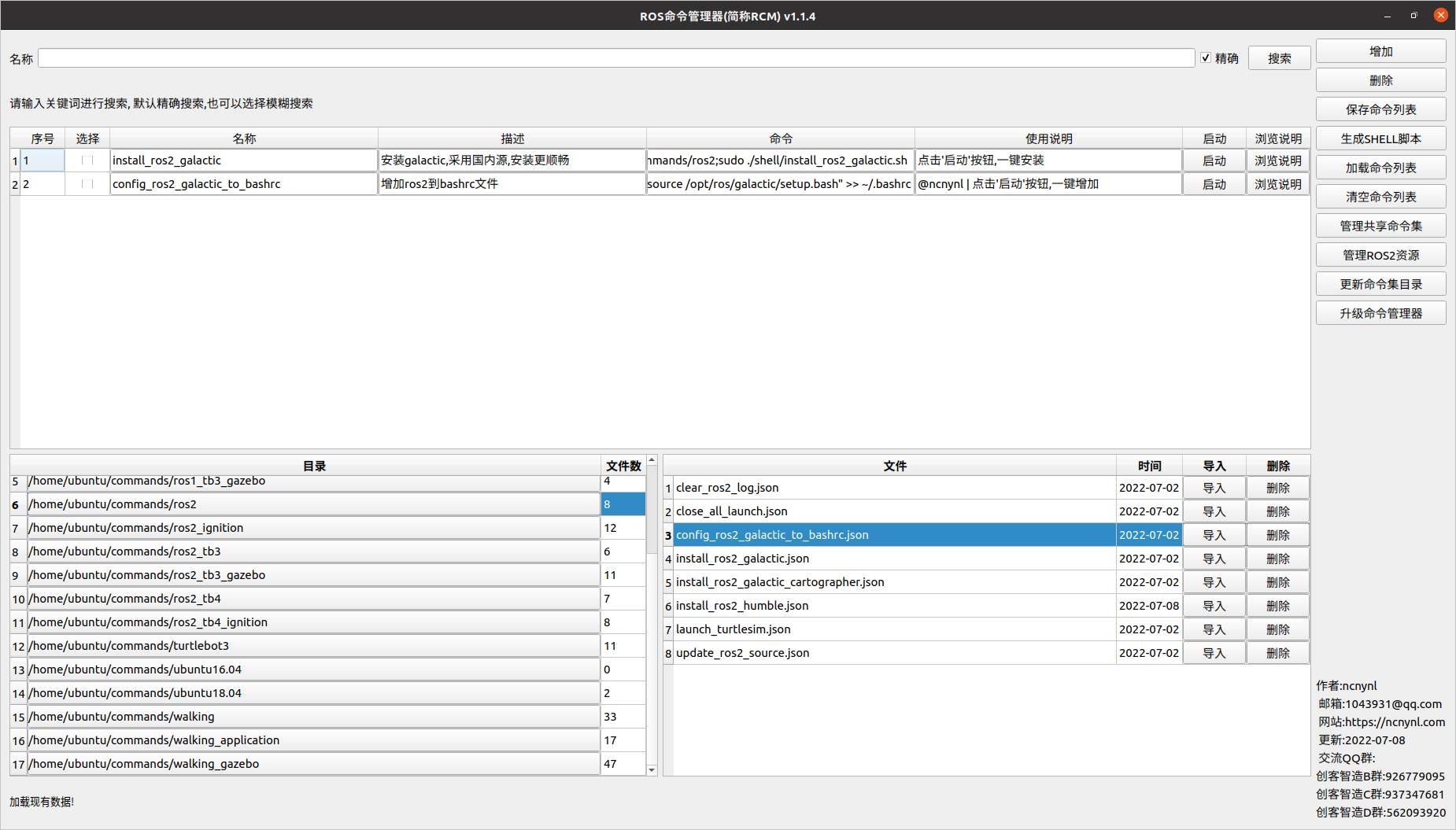
-
按照以上图片序号顺序依次运行对应的脚本,需要等待上一个脚本完成后再,再运行下一脚本
-
测试是否成功安装,新终端运行以下命令
$ ros2 topic list
/parameter_events
/rosout- 方式二:使用传统方式安装
安装Turtlebot4相关软件
-
方式一:使用
命令管理器快速安装 -
启动
ROS命令管理器
$ commands- 从下方目录栏选择
ros2目录,导入install_ros2_tb4.json、install_ros2_tb4_source和config_ros2_to_CycloneDDS.json文件
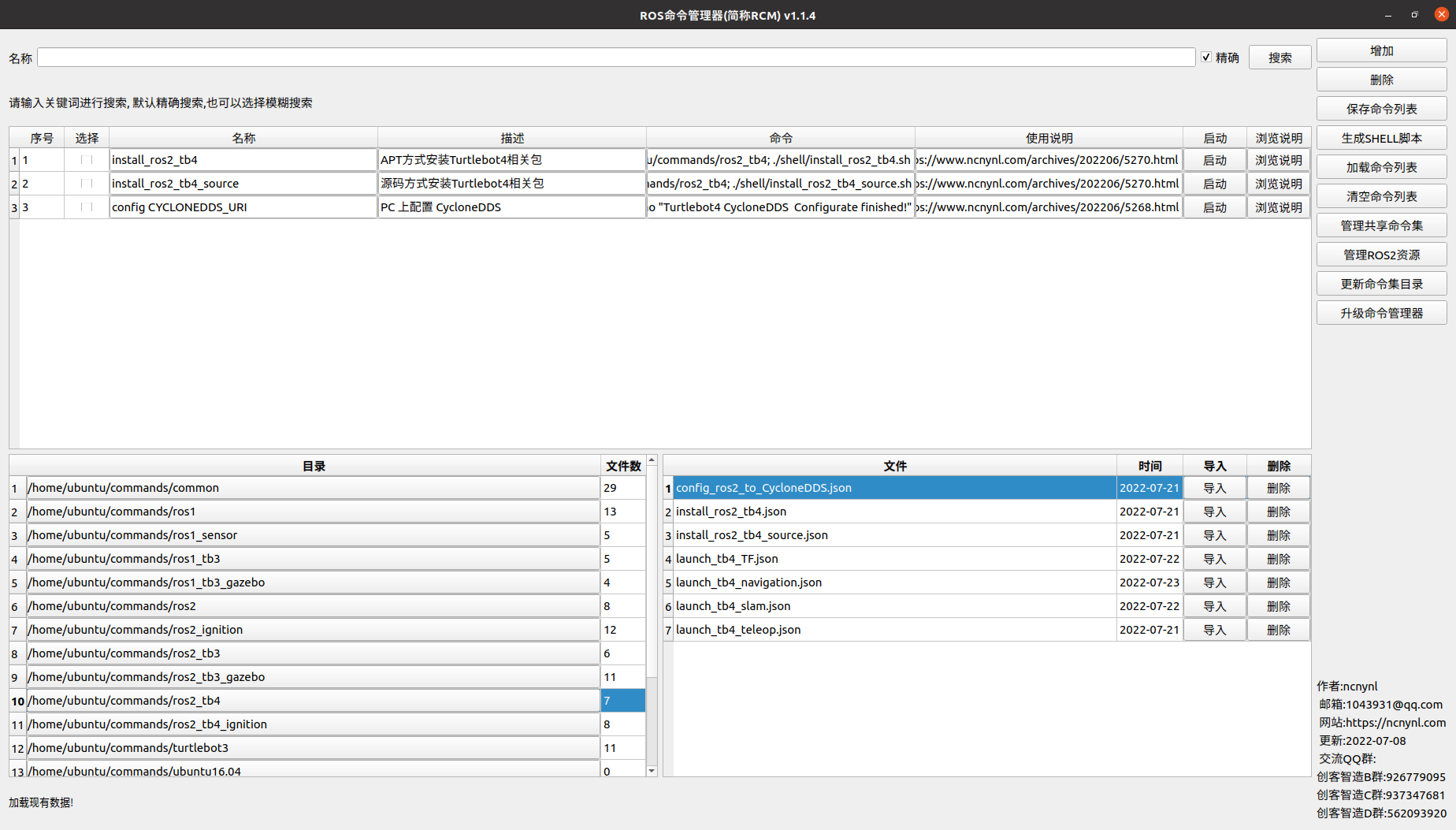
-
按照以上图片序号顺序依次运行对应的脚本,需要等待上一个脚本完成后再,再运行下一脚本
-
方式二:使用传统方式安装
-
安装相关依赖
$ sudo apt update && sudo apt install -y \
build-essential \
cmake \
git \
python3-colcon-common-extensions \
python3-flake8 \
python3-pip \
python3-pytest-cov \
python3-rosdep \
python3-setuptools \
python3-vcstool \
wget- 添加
CycloneDDS配置
$ echo "export CYCLONEDDS_URI='<CycloneDDS><Domain><General><DontRoute>true</></></></>'" >> ~/.bashrc- apt安装相关包
$ sudo apt update
$ sudo apt install ros-galactic-turtlebot4-description \
ros-galactic-turtlebot4-msgs \
ros-galactic-turtlebot4-navigation \
ros-galactic-turtlebot4-node \
ros-galactic-turtlebot4-robot \
ros-galactic-turtlebot4-desktop \
ros-galactic-turtlebot4-simulator \
ros-galactic-irobot-create-nodes- 源码安装相关包
$ mkdir -p ~/ros2_tb4_ws/src
$ cd ~/ros2_tb4_ws/src
$ git clone -b galactic https://ghproxy.com/https://github.com/turtlebot/turtlebot4.git
$ git clone -b galactic https://ghproxy.com/https://github.com/iRobotEducation/create3_sim.git
$ git clone -b galactic https://ghproxy.com/https://github.com/iRobotEducation/irobot_create_msgs.git
$ git clone -b galactic https://ghproxy.com/https://github.com/turtlebot/turtlebot4_robot.git
$ git clone -b main https://ghproxy.com/https://github.com/luxonis/depthai-ros
$ git clone -b main https://ghproxy.com/https://github.com/luxonis/depthai-ros-examples.git
$ git clone -b galactic https://ghproxy.com/https://github.com/turtlebot/turtlebot4_desktop.git
$ git clone -b galactic https://ghproxy.com/https://github.com/turtlebot/turtlebot4_simulator.git
$ cd ~/ros2_tb4_ws
$ rosdep install --from-path src -yi
$ source /opt/ros/galactic/setup.bash
$ colcon build --symlink-install
$ echo "source ~/ros2_tb4_ws/install/local_setup.bash" >> ~/.bashrc纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot4交流群,微信扫描右侧二维码立即进群交流