



















TurtleBot4快速入门教程-OAK深度相机检测
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot4交流群,微信扫描右侧二维码立即进群交流

TurtleBot4快速入门教程-OAK深度相机检测
说明:
- 本教程主要介绍如何检测OAK深度相机检测
相关设备
- TurtleBot4机器人套件:采购地址
操作步骤
-
如果是使用humble版本,机器人对接充电桩,由于新的省电模式,相机将默认关闭。不对接充电桩,可以正常使用相机
-
默认情况下,TB4会开机自启动OAK深度相机检测的ROS程序,不需要重复启动
-
[Remote PC] 查看相机话题数据
$ ros2 topic echo /color/preview/image
header:
stamp:
sec: 1660106517
nanosec: 737914306
frame_id: oakd_pro_rgb_camera_optical_frame
height: 250
width: 250
encoding: bgr8
is_bigendian: 0
step: 750
data:
- 101
- 111
- 116
- 92
- 102
- 107
- 93
...- [Remote PC] 启动可视化界面
$ ros2 launch turtlebot4_viz view_model.launch.py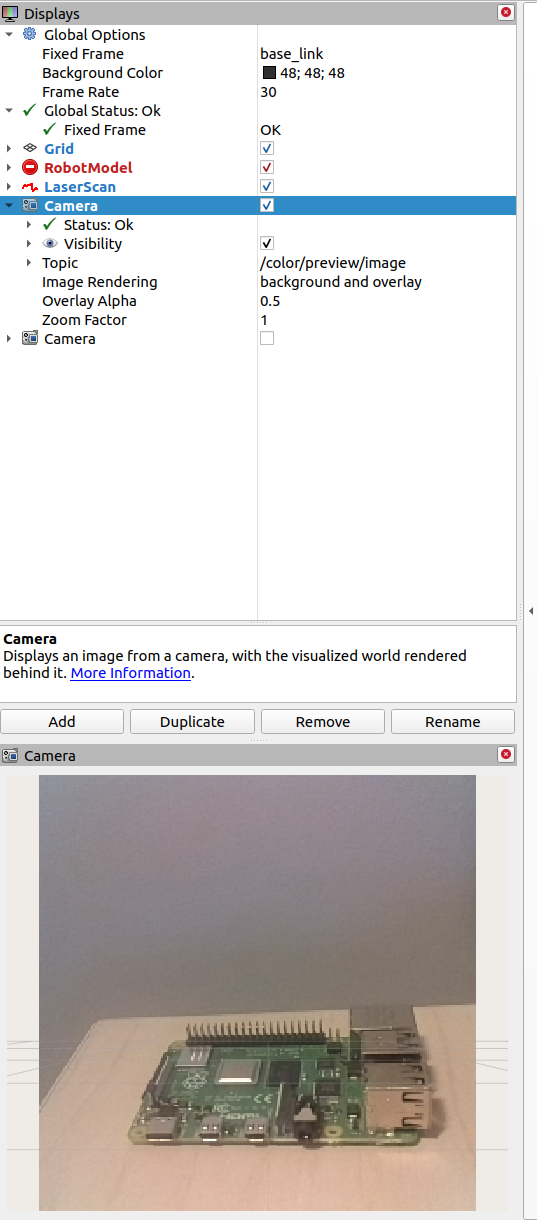
演示视频
<iframe height=498 width=100% src="//player.bilibili.com/player.html?aid=860131046&bvid=BV1JG4y1o7yt&cid=892965098&page=1" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"> </iframe>纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot4交流群,微信扫描右侧二维码立即进群交流