



















ROS2与turtlebot4仿真入门教程-turtlebot4同步建图
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot4交流群,微信扫描右侧二维码立即进群交流

ROS2与turtlebot4仿真入门教程-turtlebot4同步建图
说明:
- 介绍如何仿真下实现同步建图
步骤:
- 启动仿真
ros2 launch turtlebot4_ignition_bringup turtlebot4_ignition.launch.py slam:=true rviz:=true- 开始仿真,离开充电桩,利用鼠标左键和中键,调整视图
- ign效果图

- rviz效果图:

- 启动键盘
ros2 run teleop_twist_keyboard teleop_twist_keyboard- 可以通过键盘控制小车移动键盘
- 效果图:

- 同步建图比异步建图的效果好很多
保存地图:
- 方法1,执行命令:
$ ros2 service call /slam_toolbox/save_map slam_toolbox/srv/SaveMap "{name: {data: 'map_name'}}"
requester: making request: slam_toolbox.srv.SaveMap_Request(name=std_msgs.msg.String(data='map_name'))
response:
slam_toolbox.srv.SaveMap_Response()- 可以更改地图map_name, 地图保存在你执行这个命令的目录下
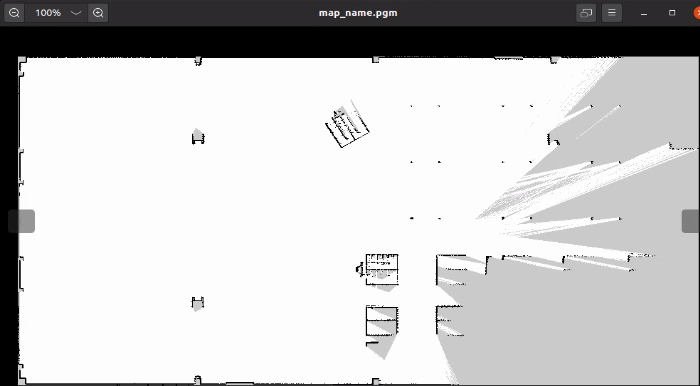
- 查看地图
eog map_name.pgm- 效果图
- 方法2,执行命令:
#新建地图目录
mkdir ~/map
#保持地图
ros2 run nav2_map_server map_saver_cli -f ~/map/slam_toolbox_sync --ros-args -p save_map_timeout:=10000.00- 指定保持目录~/map和地图名称slam_toolbox_sync
- 查看地图
eog ~/map/slam_toolbox_sync.pgm演示视频
<iframe height=498 width=100% src="//player.bilibili.com/player.html?isOutside=true&aid=1806260592&bvid=BV11b421E7c7&cid=1624300065&p=1&as_wide=1&high_quality=1&danmaku=0" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"></iframe>纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot4交流群,微信扫描右侧二维码立即进群交流