



















ROS2与turtlebot4仿真入门教程-turtlebot4多点导航
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot4交流群,微信扫描右侧二维码立即进群交流

ROS2与turtlebot4仿真入门教程-turtlebot4多点导航
说明:
- 介绍如何实现仿真turtlebot多点导航
步骤:
- 启动仿真
ros2 launch turtlebot4_ignition_bringup turtlebot4_ignition.launch.py nav2:=true slam:=false localization:=true- 这将在默认的 depot 世界中启动模拟,并将使用现有的 depot.yaml 文件作为地图。
- 效果图:

- 启动rviz2
ros2 launch turtlebot4_viz view_robot.launch.py use_sim_time:=true- 效果图:
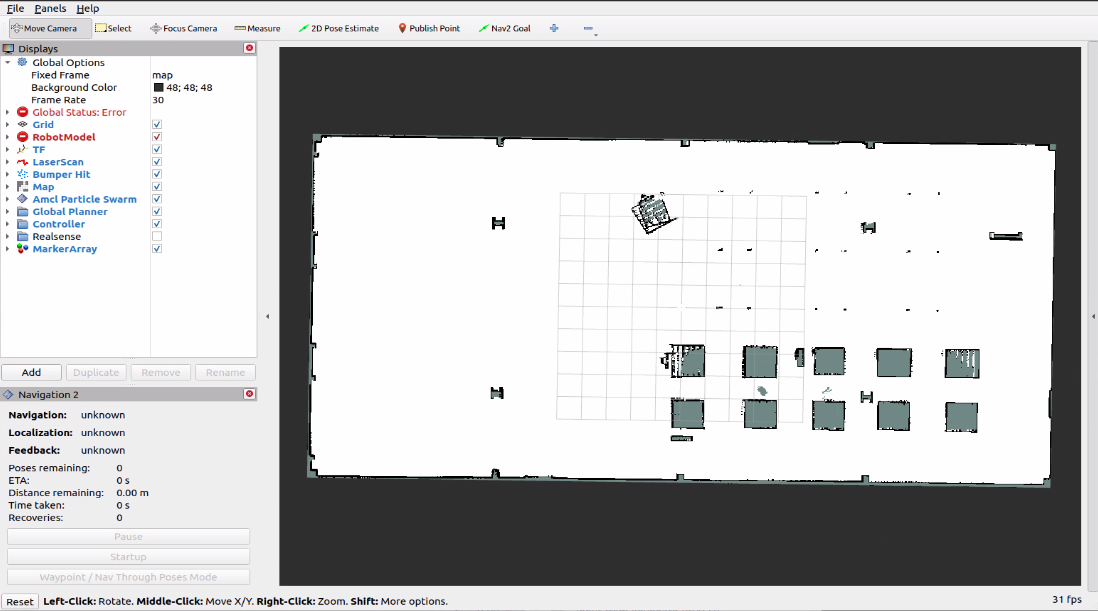
- 点击左下角的三角符号开始仿真
- 通过2D Pose Estimate初始化位置
- 默认的初始位置是地图中间位置有三个颜色的点,选择中间点,方向指向红色点就可以
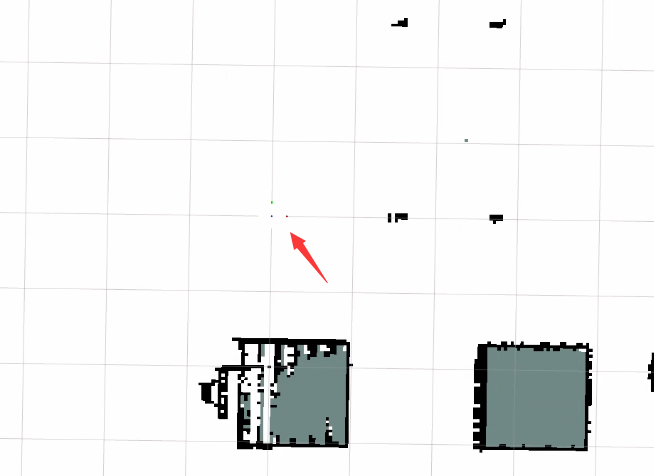
- 并设置LaserScan的style为Boxes, Size为0.1, 视觉会更好些
- 初始化后的效果图:

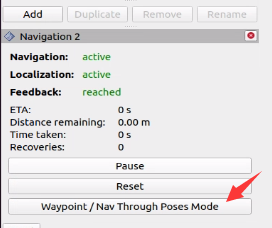
- 点击右上角2点按钮,离开充电桩,调整界面视角

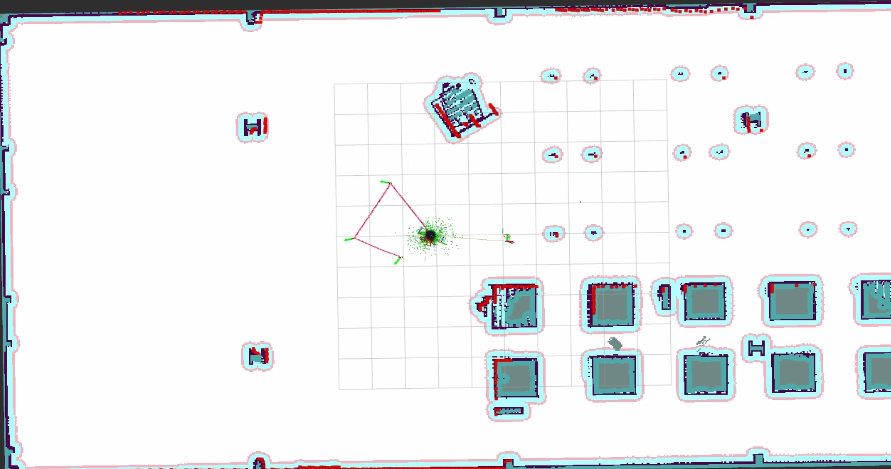
- 点击waypoint按钮开始多点导航
- 再通过nav2 Goal设定多个目标点
- 如图:

-
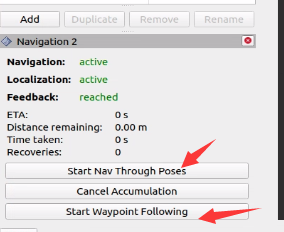
最后点击Start Nav Through Poses或Start Waypoint Following进行能够导航
-
前者是按航道先规划出一条路径,沿路径前进,后者是每个点之间独立导航,一个个点完成
-
如图1
-
前者如图2
演示视频
<iframe height=498 width=100% src="//player.bilibili.com/player.html?isOutside=true&aid=1456469484&bvid=BV1bi421a78V&cid=1624301245&p=1&as_wide=1&high_quality=1&danmaku=0" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"></iframe>纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot4交流群,微信扫描右侧二维码立即进群交流