



















walking云台入门教程-颜色识别追踪例程

文章说明
- 本教程主要介绍如何使用walking云台来进行颜色识别追踪例程
- 进行颜色识别追踪例程前,需要进行过滤指定颜色标定操作
- 测试环境:
walking-gb2l云台+罗技C920相机
前提准备
- 若相机使用中发现镜头畸变严重,应使用进行
camera_calibration包进行标定
标定步骤
- 启动USB摄像头
$ ros2 launch walking_turret usb_cam.launch.py resolution:=320x240- 启动颜色标定程序
$ ros2 launch walking_turret example_color_tracker_calibrator.launch.py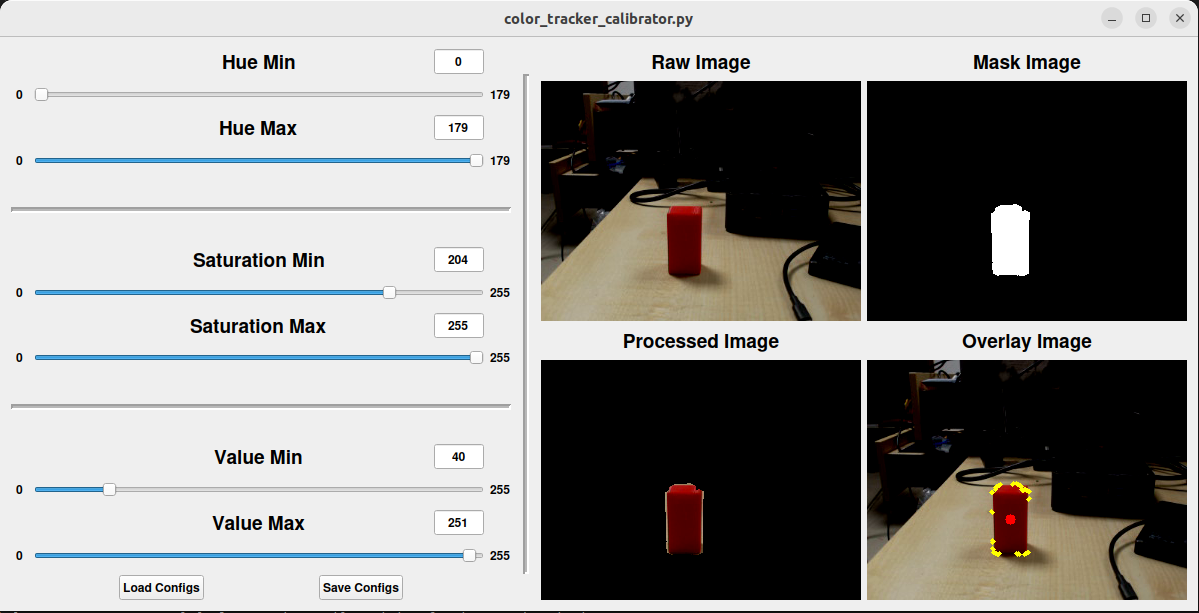
-
调整参数,过滤颜色
-
调整完成后,需要覆盖配置文件到
walking_turret/config/color_filter_hsv.csv上 -
关闭所有终端
测试步骤
- 启动云台
$ ros2 launch walking_turret turret.launch.py- 启动USB摄像头
$ ros2 launch walking_turret usb_cam.launch.py resolution:=320x240- 启动颜色识别追踪程序
$ ros2 launch walking_turret example_color_tracker.launch.py演示视频
颜色标定
<iframe height=498 width=100% src="//player.bilibili.com/player.html?isOutside=true&aid=113603613036240&bvid=BV1yyieYqEYL&cid=27201962708&p=1&high_quality=1&danmaku=0" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"></iframe>测试
<iframe height=498 width=100% src="//player.bilibili.com/player.html?isOutside=true&aid=113603613101760&bvid=BV1NyieYBEwt&cid=27201962425&p=1&high_quality=1&danmaku=0" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"></iframe>