说明
相关软件
ubuntu 22.04 系统,搭配ros2 humble
rslidar_SDK 多线雷达驱动
wheeltec_imu_ros2 IMU驱动
wheeltec_gps_ros2 gps驱动
depthai-python-ros2 oak相机驱动
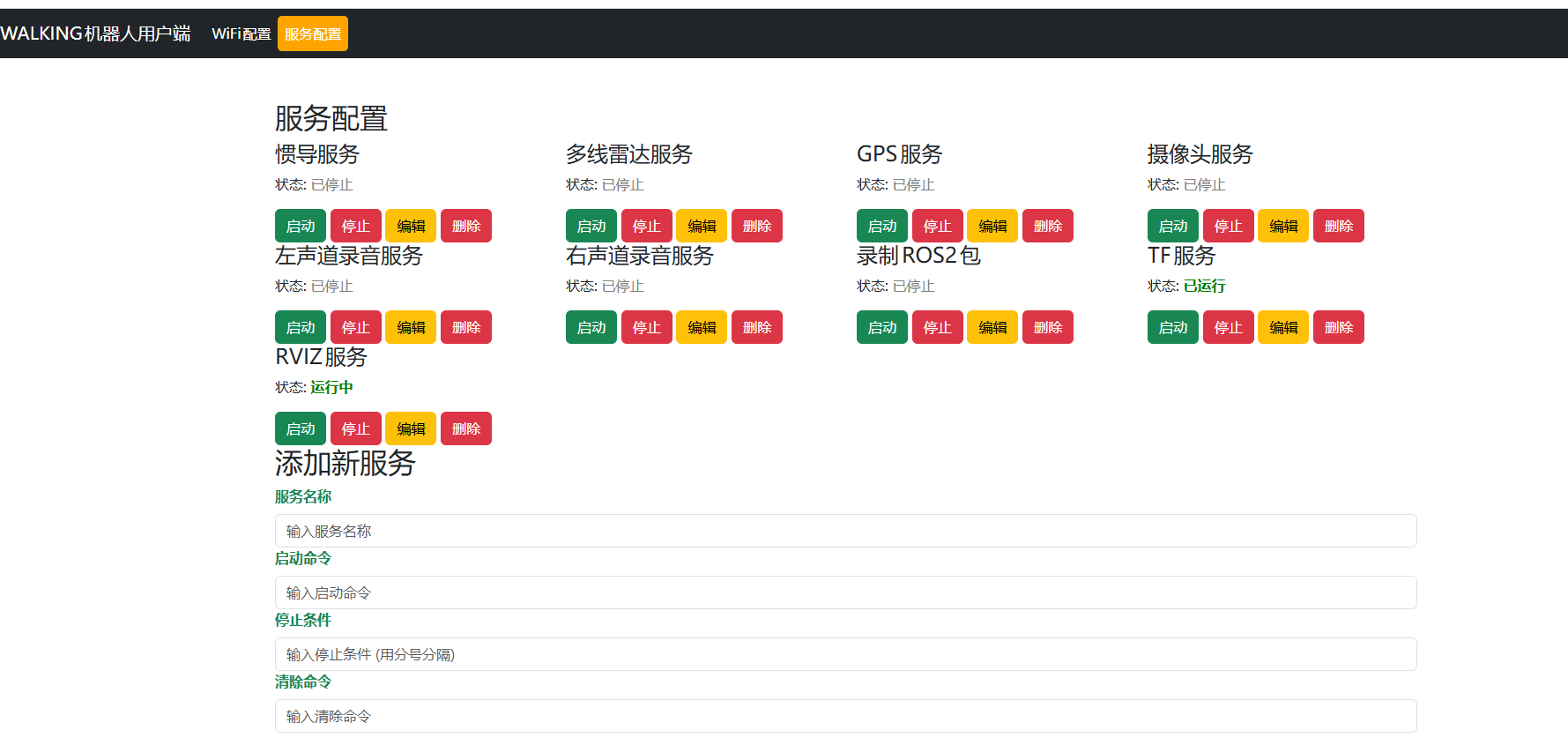
walking_webapi 网站管理接口
## 数据录制包目录结构
~/data_ros2bag #ros2录制包位置
cd ~/data_ros2bag
ros2 bag play sensor_bag #播放对应包名内容
~/data_voice #声音录制包位置
~/ros2_sensor_ws #传感器驱动工作空间
~/tools/depthai-python-ros2 #摄像头python驱动包
~/tools/depthai-python-ros2/utility/cam-ros.py #摄像头ROS2话题发布
~/tools/depthai-python-ros2/utility/tf.py #所有传感器的TF发布
~/tools/flutter/walking_webapi #网站接口代码
演示视频
<iframe height=498 width=100% src="//player.bilibili.com/player.html?isOutside=true&aid=113678640743411&bvid=BV1YjkgYcEpP&cid=27419608665&p=1&high_quality=1&danmaku=0" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"></iframe>




















