说明
- 介绍如何利用walking-dc数据采集包来采集GPS数据
热点模式-此模式方便在室外无wifi情况下
-
- NUC热点是walking-dc,可通过手机和笔记本电脑连上热点,访问web接口来开启或停止服务
-
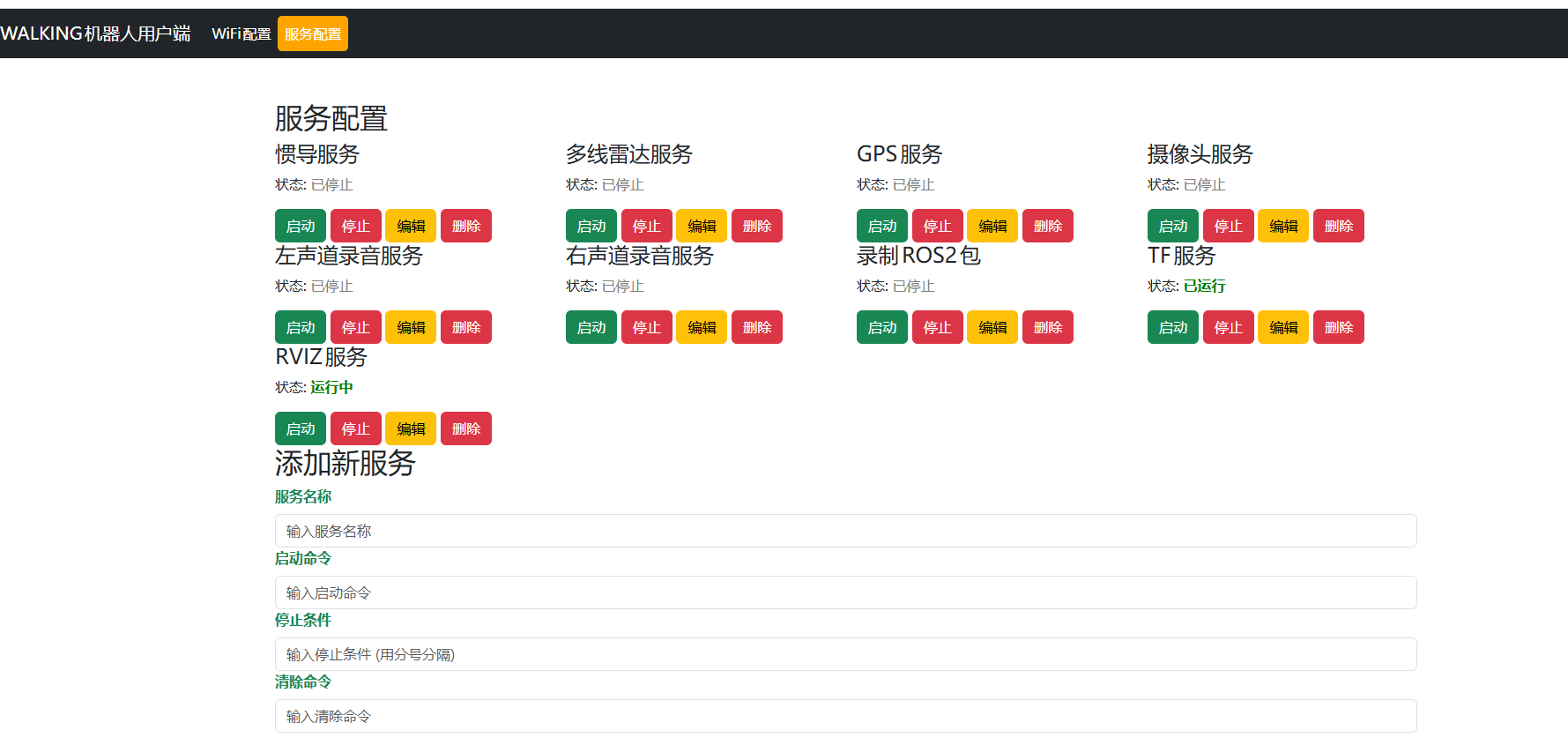
- 访问web接口,浏览器可访问:192.168.12.1:5050
- 效果图
-
- web界面->GPS服务->启动按钮, 点击即可启动GPS
-
- 笔记本电脑上利用nomachine远程访问NUC界面
-
- web界面->RVIZ服务->启动按钮, 在NUC上会打开rviz,并显示GPS可视化数据
-
- web界面->ROS包服务->启动按钮,即会录制所有ROS话题。录制的内容位于 ~/data_ros2bag目录下。
录制包按时间命名的目录,目录里包含录制的ROS话题数据。
wifi模式-此模式是在外部有wifi局域网情况下
-
- NUC先连接显示屏,开机进行系统后,通过桌面连上局域网的wifi,同时笔记本电脑也连上局域网wifi
-
- 访问web接口,假设NUC的ip是192.168.0.213,浏览器可访问http://192.168.0.213:5050
- 效果图
-
- web界面->GPS服务->启动按钮, 点击即可启动GPS
-
- 笔记本电脑上利用nomachine远程访问NUC界面
-
- web界面->RVIZ服务->启动按钮, 在NUC上会打开rviz,并显示GPS可视化数据
-
- web界面->ROS包服务->启动按钮,即会录制所有ROS话题。录制的内容位于 ~/data_ros2bag目录下。
录制包按时间命名的目录,目录里包含录制的ROS话题数据。
演示视频
<iframe height=498 width=100% src="//player.bilibili.com/player.html?isOutside=true&aid=113678657521624&bvid=BV1UCkuYXEMa&cid=27419675170&p=1&high_quality=1&danmaku=0" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"></iframe>




















