



















Kobuki入门教程-Kobuki仿真
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
Kobuki入门教程-Kobuki仿真
说明
- 介绍如何进行Kobuki仿真
softkobuki
- softkobuki是伪kobuki节点执行(仿真 iClebo Kobuki)。
- 它监听/mobile_base/commands/velocity话题和广播关节状态和里程信息
步骤
- 命令:
$ sudo apt-get install ros-indigo-kobuki-soft- 执行:
$ roslaunch kobuki_softnode full.launch- 查看节点话题:
$ rostopic list
/joint_states
/mobile_base/commands/motor_power
/mobile_base/commands/velocity
/mobile_base/version_info
/odom
/tf查看rviz
- 命令:
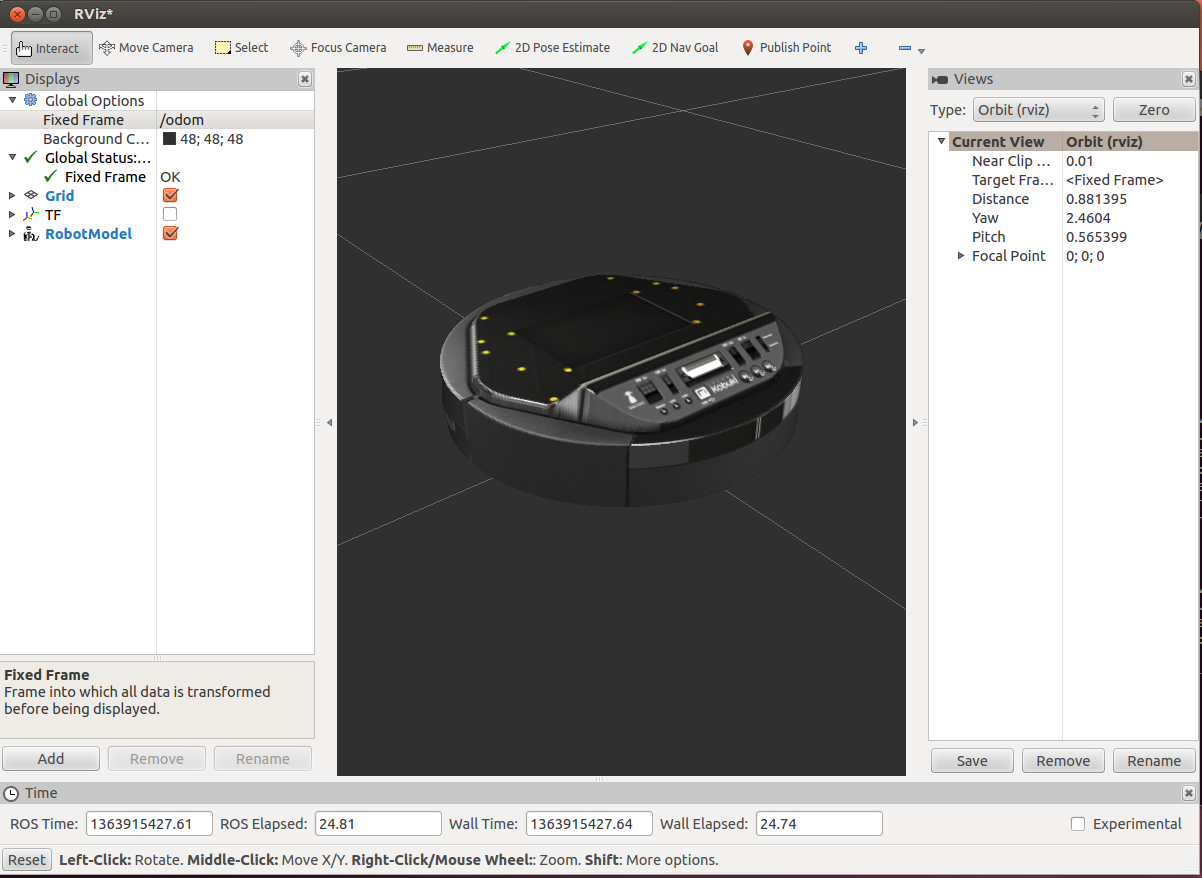
$ rosrun rviz rviz- 设置 fixed frame '/odom'
- 增加 RobotModel
- 效果图示:
遥控
- 命令:
$ roslaunch kobuki_keyop keyop.launch导航
- 安装导航相关包
$ sudo apt-get install ros-indigo-turtlebot-apps
$ sudo apt-get install ros-indigo-turtlebot-viz
$ sudo apt-get install ros-indigo-navigation
$ sudo apt-get install ros-indigo-yujin-maps- 执行:
$ roslaunch kobuki_softapps nav_demo.launch- rviz效果:(设置2D Nav Goal)

纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号