



















TX2入门教程硬件篇-外接深度相机RealSense r200
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
TX2入门教程硬件篇-外接深度相机RealSense r200
说明:
- 介绍如何在TX2上使用深度相机RealSense r200
步骤:
- 安装Librealsense驱动
$ mkdir ~/realsense
$ cd ~/realsense
$ git clone https://github.com/jetsonhacks/installLibrealsenseTX2.git
$ cd installLibrealsenseTX2
$ ./installLibrealsense.sh- 安装 USB Video Class (UVC) 驱动作为核心模块
$ ./buildPatchedKernel.sh- 这里要注意,你要有内核已经下载好,参考编译内核
- 设置USB不会自动关闭
$ ./setupTX1.sh- 重启电脑,让驱动生效。
测试使用
- 进入目录
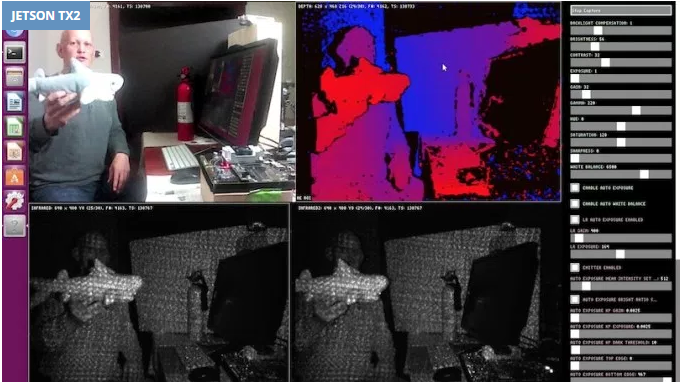
$ cd ~/librealsense/build/examples
$ ./cpp-capture- 效果可参考:
问题:
- 问题:运行./ccp-capture 提示:No device
- 测试:
- 使用sudo ./cpp-capure是否可用,如果可用。
- ls /dev/video* 是否有内容video0-3
- lsusb 是否有intel corp内容
- 修复:执行命令赋权限
sudo usermod -a -G plugdev ubuntu
sudo usermod -a -G plugdev nvidia纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号