



















TX2入门教程硬件篇-外接xbox游戏杆
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
TX2入门教程硬件篇-外接xbox游戏杆
说明:
- 介绍如何接入游戏杆控制小车
步骤:
- 安装xbox手柄驱动,参考网站文章xbox360无线游戏杆控制turtlebot
sudo apt-add-repository ppa:rael-gc/ubuntu-xboxdrv
sudo apt-get update && sudo apt-get install ubuntu-xboxdrv-
编译tx2开发板增加游戏杆的支持,参考网站文章TX2入门教程软件篇-编译内核
-
下载安装代码
$ mkdir ~/kernel
$ cd ~/kernel
$ git clone https://github.com/jetsonhacks/buildJetsonTX2Kernel.git
$ cd buildJetsonTX2Kernel- 执行kernel下载和配置
$./getKernelSources.sh- 在弹出的配置项目,选择joysticks支持
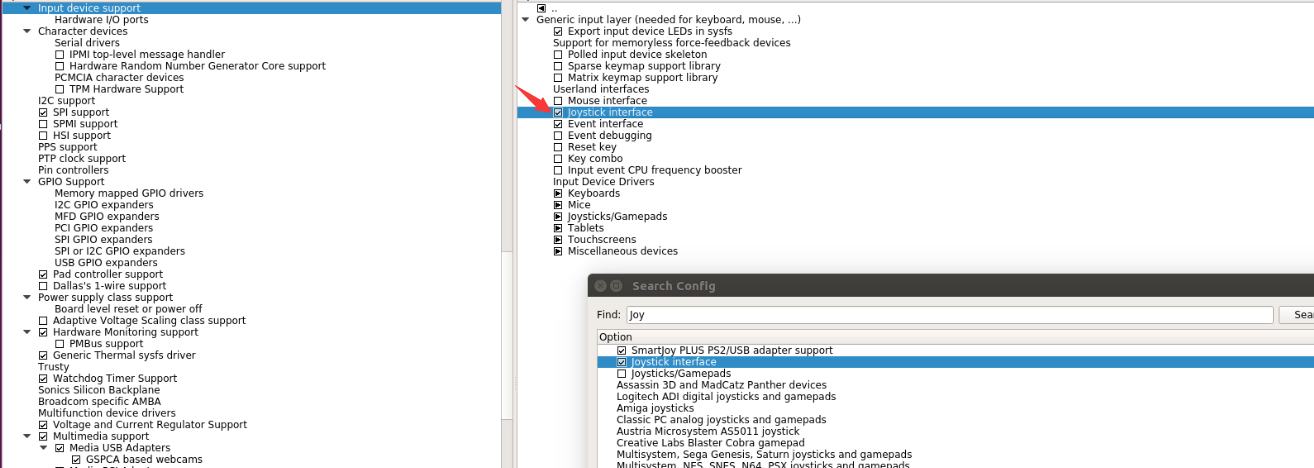
- 再选择xbox支持
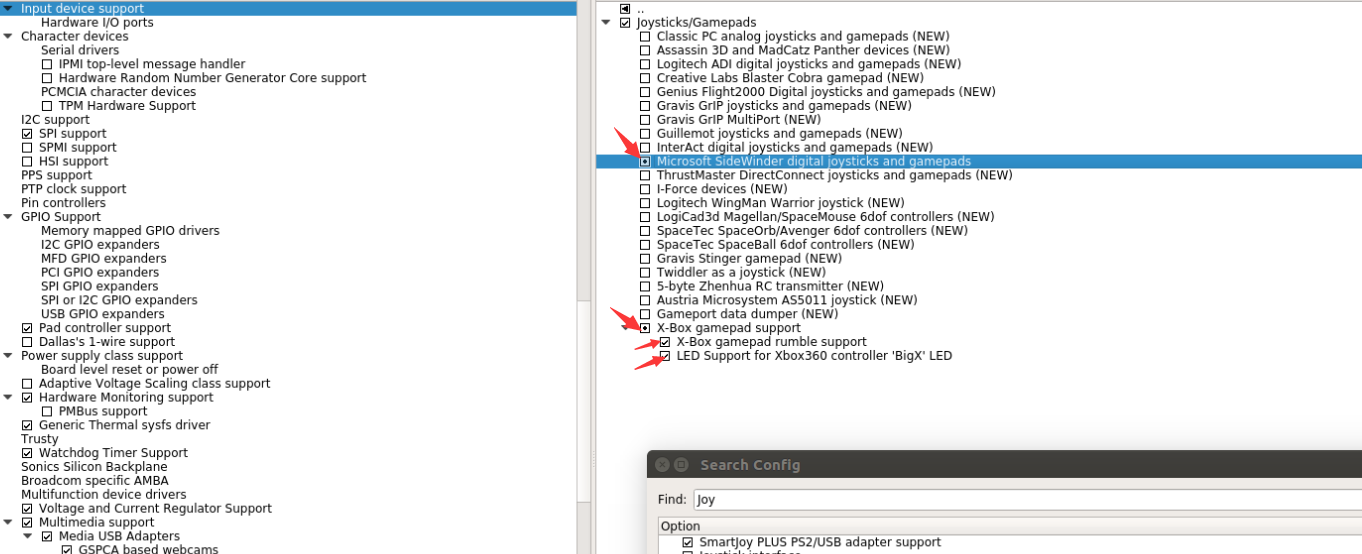
- 内核编译
$./makeKernel.sh- 复制内核并激活
$./copyImage.sh- 重启使用新内核
$sudo reboot- 测试,根据参考文章xbox360无线游戏杆控制turtlebot
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号