



















Turtlebot3-burger入门教程-雷达安装
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流

说明
- 介绍burger上如何进行雷达安装和测试
相关设备
- Turtlebot3-burger套件:采购地址
前提准备
-
默认我们提供的turtlebot3上已经安装好雷达驱动,只需要在PC安装即可
-
[Remote PC]安装驱动
$ sudo apt-get install ros-kinetic-hls-lfcd-lds-driver操作步骤
- [Remote PC] 启动roscore
$ roscore- [TurtelBot] 启动雷达
$ roslaunch hls_lfcd_lds_driver hlds_laser.launch- [Remote PC] 启动rviz
$ rosrun rviz rviz -d rospack find hls_lfcd_lds_driver/rviz/hlds_laser.rviz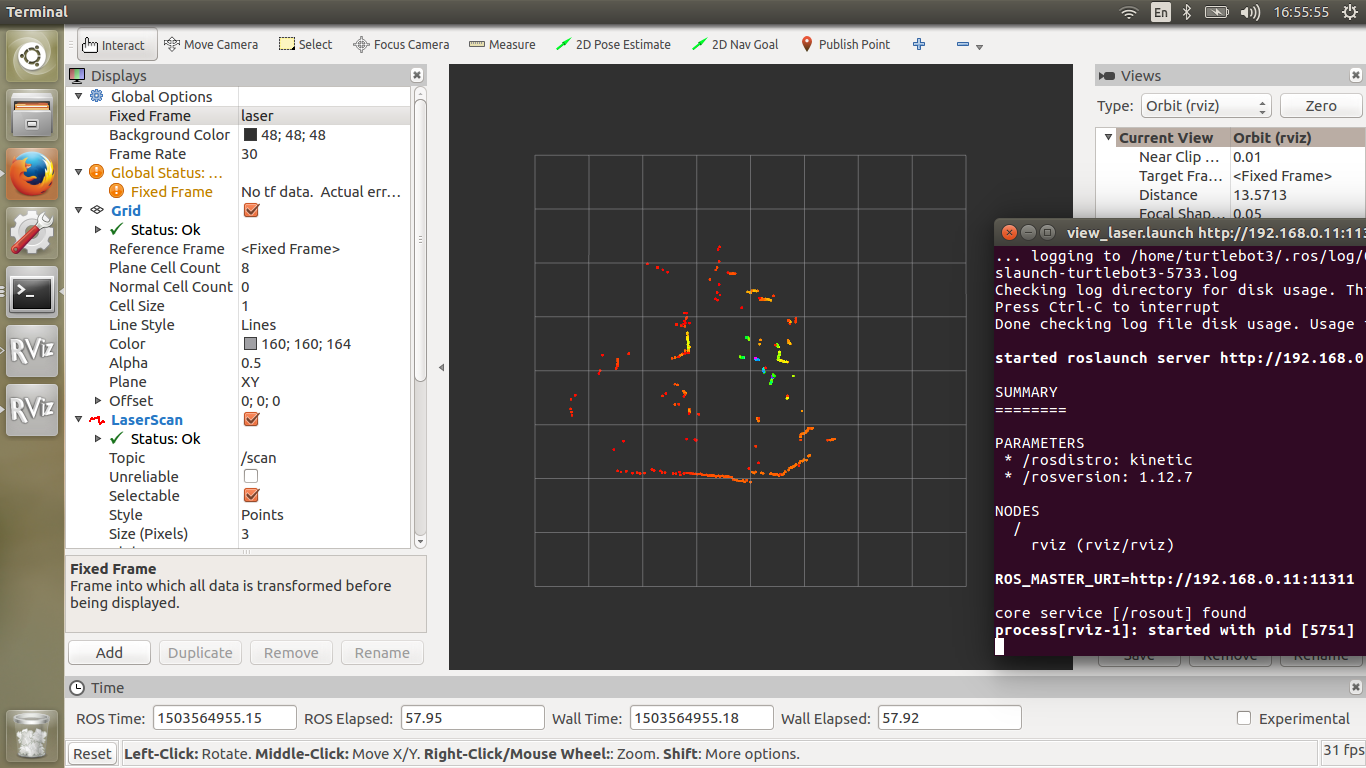
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流