



















ROS与PhantomXArm教程-arbotix-M烧录ROS固件
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
ROS与PhantomXArm教程-烧录ROS固件
说明
- 介绍如何为arbotix-m板烧录ROS固件
操作步骤
-
PC与Arbotix-M板, 参考文档
- 利用附带的FTDI线,USB端连接PC端
- 另一端连接Arbotix板的FTDI口, 注意方向,黑线靠近板上的blk字样
-
效果图:

-
使用USB供电
-
跳线帽插入靠近板上的USB字样一边
-
效果图:
-

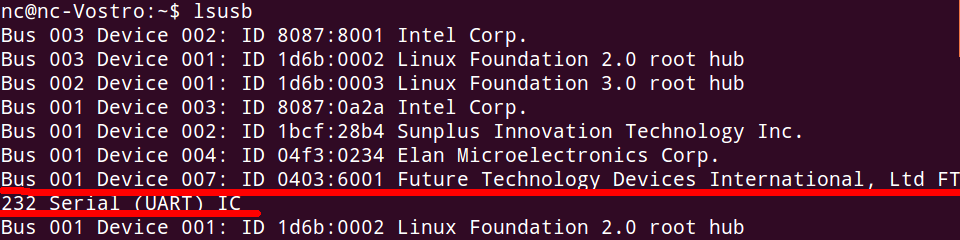
- 检查pc端是否插入USB,打开新终端输入:
$ lsusb- 效果图:
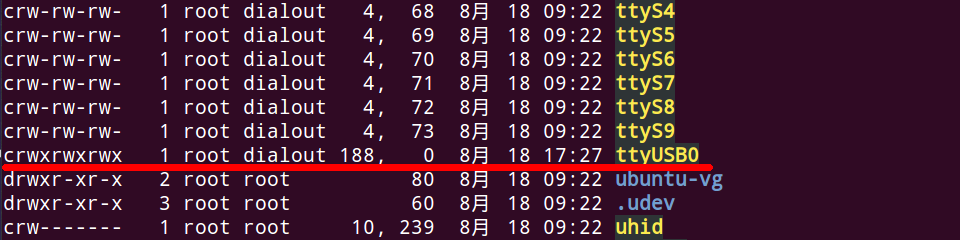
- 检查
ttyUSB0端口是否存在且赋予权限,打开新终端输入:
$ ls /dev/ -la
$ sudo chmod 777 /dev/ttyUSB0- 效果图:
- 启动arduino
$ ~/tools/arduino-1.0.6/arduino-
烧录步骤:
-
界面上,选择File -> Sketchbook -> Arbotix Sketches -> ros , 会打开新代码界面
-
效果图:
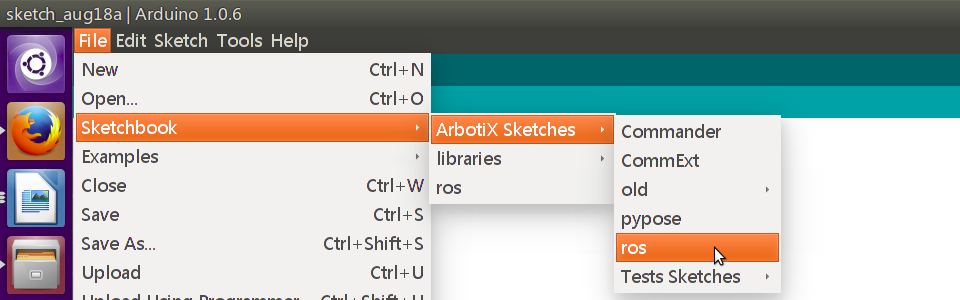
- 新界面:
-
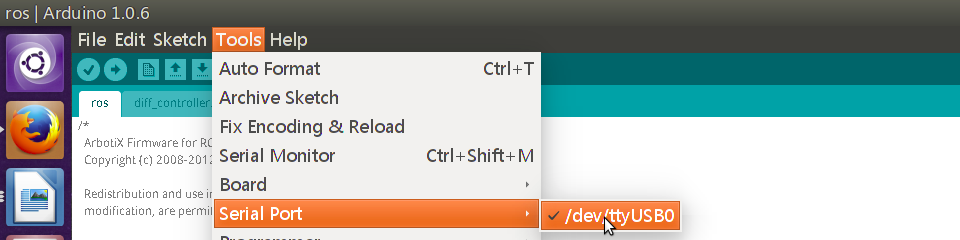
选择Tools -> Serial Port -> 对应的USB端口号,一般是/dev/ttyUSB0
-
效果图:
-
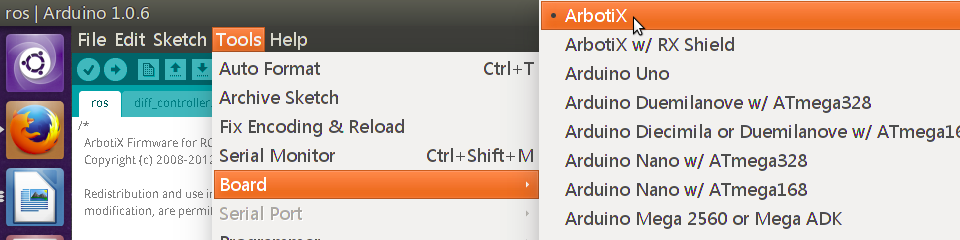
选择Tools -> Board -> Arbotix
-
效果图:
-
最后选择File->upload
-
效果图:
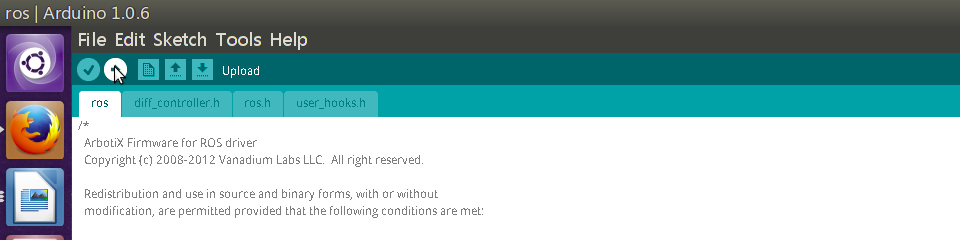
- 烧录成功效果图:

-
外接电源供电
-
烧录固件后恢复使用外接电源供电
-
跳线帽插入靠近板上的VIN字样一边
-
效果图:
-

纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号