



















TurtleBot-Blockly入门教程-创建带输入的block
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
TurtleBot-Blockly入门教程-创建带输入的block
说明:
- 介绍如何编写带输入功能的block
- block类型有三种:
- 带输入的block
- 带输出的block
- 不带输入或输出的block
带输入的block:
- 涉及的两个文件:
turtlebot_blockly/frontend/blockly/generators/python/customName.js
turtlebot_blockly/frontend/blockly/blocks/customName.js- 我们将看到move_forward块的同一个例子。
- ../generators/python/customName.js中的文件具有以下代码
Blockly.Python['move_forward'] = function(block) {
var dropdown_speed = block.getFieldValue('speed');
var code = "";
code += "dropdown_speed = \"" + dropdown_speed.toString() + "\"\n";
code += Blockly.readPythonFile("../blockly/generators/python/scripts/turtlebot3/move_forward.py");
return code;
};- 下面的代码片段为用户提供了速度{SLOW,NORMAL或FAST}的值。
var dropdown_speed = block.getFieldValue('speed');- 位置../blockly/blocks/customName.js中的.js文件具有以下代码
Blockly.Blocks['move_forward'] = {
init: function() {
this.appendDummyInput()
.appendField("Move_Forward ")
.appendField(new Blockly.FieldDropdown([["SLOW", "SLOW"], ["NORMAL", "NORMAL"], ["FAST", "FAST"]]), "speed")
.appendField("Speed");
this.setPreviousStatement(true);
this.setNextStatement(true);
this.setColour(65);
this.setTooltip('');
this.setHelpUrl('http://erlerobotics.com/docs/Robot_Operating_System/ROS/Blockly/Intro.html');
}
};- 除了输入来自用户的速度值之外,我们还看到以下内容:
this.setPreviousStatement(true);
this.setNextStatement(true);- 这两行为块提供了连接前一块和未来块的方法。
- 如图:
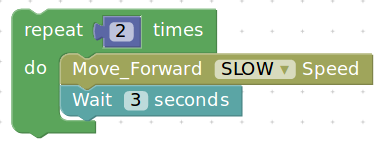
- 重复块连接到move_forward块再次连接到Wait块。
- 该组块的python脚本是:
for count in range(2):
dropdown_speed = "SLOW"
import rospy, sys
import time
from geometry_msgs.msg import Twist
pub = rospy.Publisher('cmd_vel', Twist, queue_size=10)
#rospy.init_node('circle_mode', anonymous=True)
rate = rospy.Rate(10) # 10Hz
twist = Twist()
start = time.time()
flag=True #time flag
# Angular velocity = linear velocity / radius
speed=dropdown_speed # SLOW, NORMAL, FAST
twist.linear.z = 0.00
# CLOCKWISE rotation
if speed =='SLOW':
twist.linear.y = 0.05
twist.linear.x = 0.05
elif speed =='NORMAL':
twist.linear.y = 0.25
twist.linear.x = 0.25
elif speed == 'FAST':
twist.linear.y = 0.75
twist.linear.x = 0.75
while not rospy.is_shutdown() and flag:
sample_time=time.time()
if ((sample_time - start) > 3):
flag=False
pub.publish(twist)
twist = Twist()
pub.publish(twist)
rate.sleep()
import time
time.sleep(3)纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号