



















QGroundControl入门教程-载具设置-固件
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
QGroundControl入门教程-载具设置-固件
说明:
- 本教程介绍QGroundControl地面站里面的固件设置
概述
-
QGroundControl桌面版本可以在Pixhawk系列自动驾驶仪上安装PX4 Pro或ArduPilot固件
-
默认情况下,QGC将安装所选自动驾驶仪的当前稳定版本,但您也可以选择安装Beta版本,日构建版本或自定义固件文件
-
QGroundControl还可以为SiK Radios和PX4 Flow设备安装固件
注意:平板电脑或手机版本的QGroundControl当前不提供“加载固件”
上传固件
注意:在开始安装固件之前,必须断开载具的当前所有USB连接(直接连接或通过遥测无线电连接);此时载具不能使用电池供电
- 首先在顶部工具栏中选择“齿轮”图标(“载具设置”),然后在侧边栏中选择“固件”
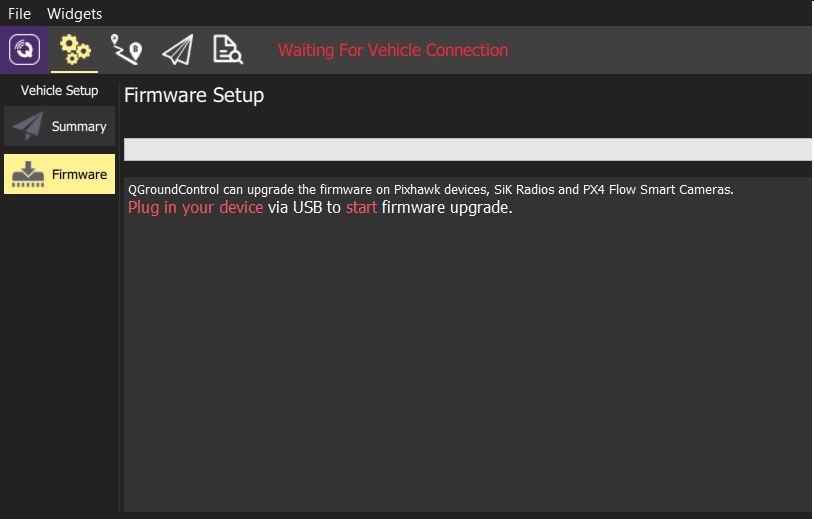
-
通过USB将设备(Pixhawk,SiK Radio,PX4 Flow)直接连接到计算机
-
连接USB时,请直接连接到计算机上的USB端口(请勿通过USB集线器连接)
-
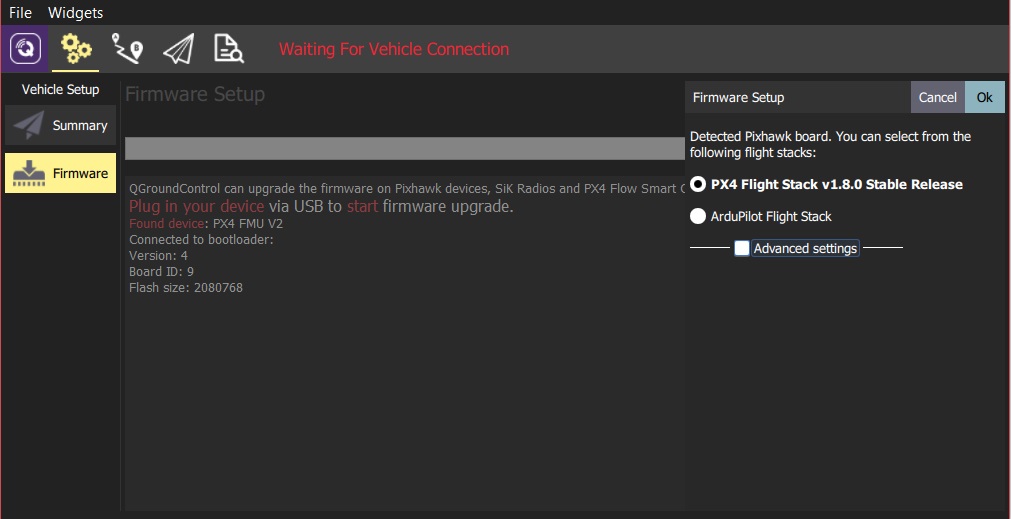
连接设备后,您可以选择要加载的固件(QGroundControl根据所连接的硬件自动选择对应的固件)
-
对于兼容Pixhawk的板,请选择PX4 Flight Stack vX.XX稳定版本或ArduPilot Flight Stack单选按钮以下载当前的稳定版本
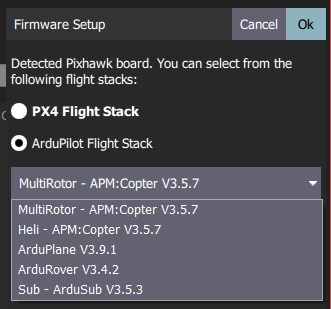
- 如果选择ArduPilot,则还必须选择车辆类型的特定固件(如下所示)
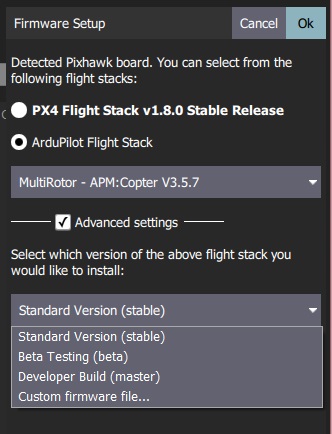
- 选中高级设置以选择特定的开发人员版本或从本地文件系统安装固件
加粗文字
-
单击确定按钮开始更新
-
然后,固件将执行许多升级步骤(下载新固件,擦除旧固件等)
-
每个步骤都会在出现在界面上,并且总体进度会显示在进度条上
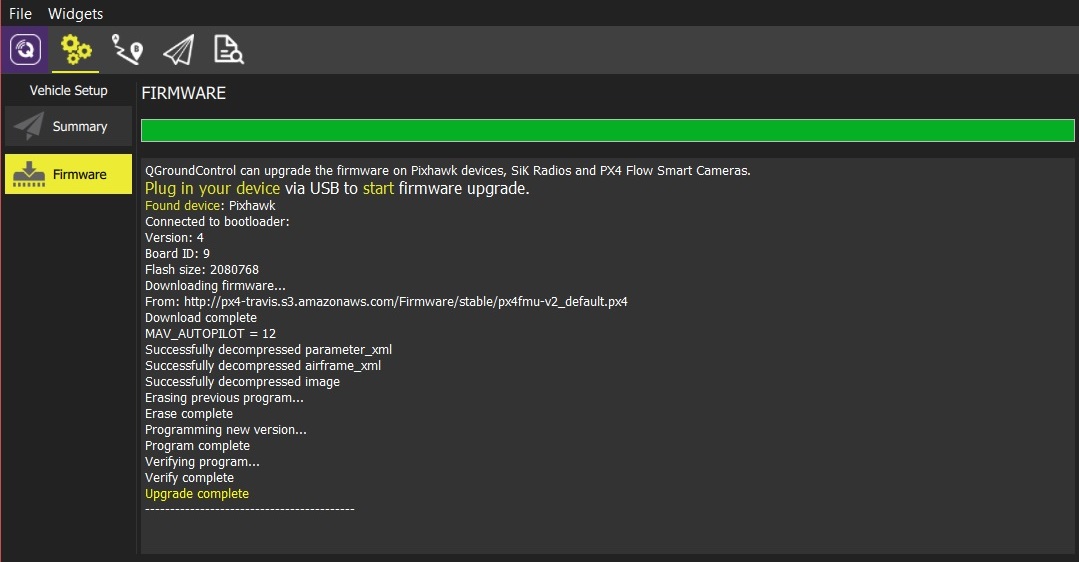
-
固件加载完成后,设备/载具将重新启动并重新连接
-
接下来,您需要配置机体(然后配置传感器,无线电等)
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号