



















QGroundControl入门教程-载具设置-机体
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
QGroundControl入门教程-载具设置-机体
说明:
- 本教程主要介绍QGroundControl地面站上设置载具的机体
概述
-
该页面允许您配置与载具关联的主要机体选择
-
使用的固件不同,视图/过程也略有不同
-
其主要分为ArduPilot和PX4两种
ArduPilot
-
“机体设置”仅在ArduCopter和ArduSub载具上可用(对于ArduPilot Rover或Plane车辆未显示)
-
ArduCopter机体设置
-
打开机体设置界面
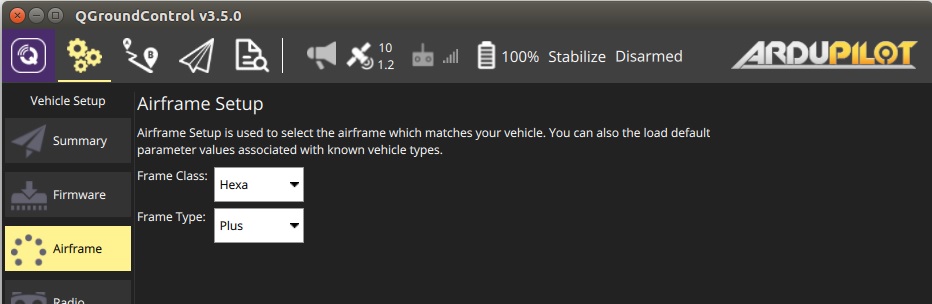
- 为您的载具选择机体类型
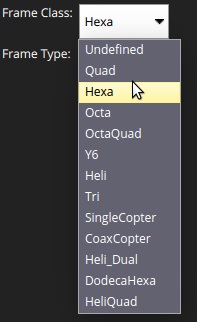
-
您将需要重新启动载具,以使更改生效
-
为您的车辆选择特定的类别型号
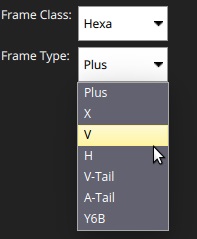
-
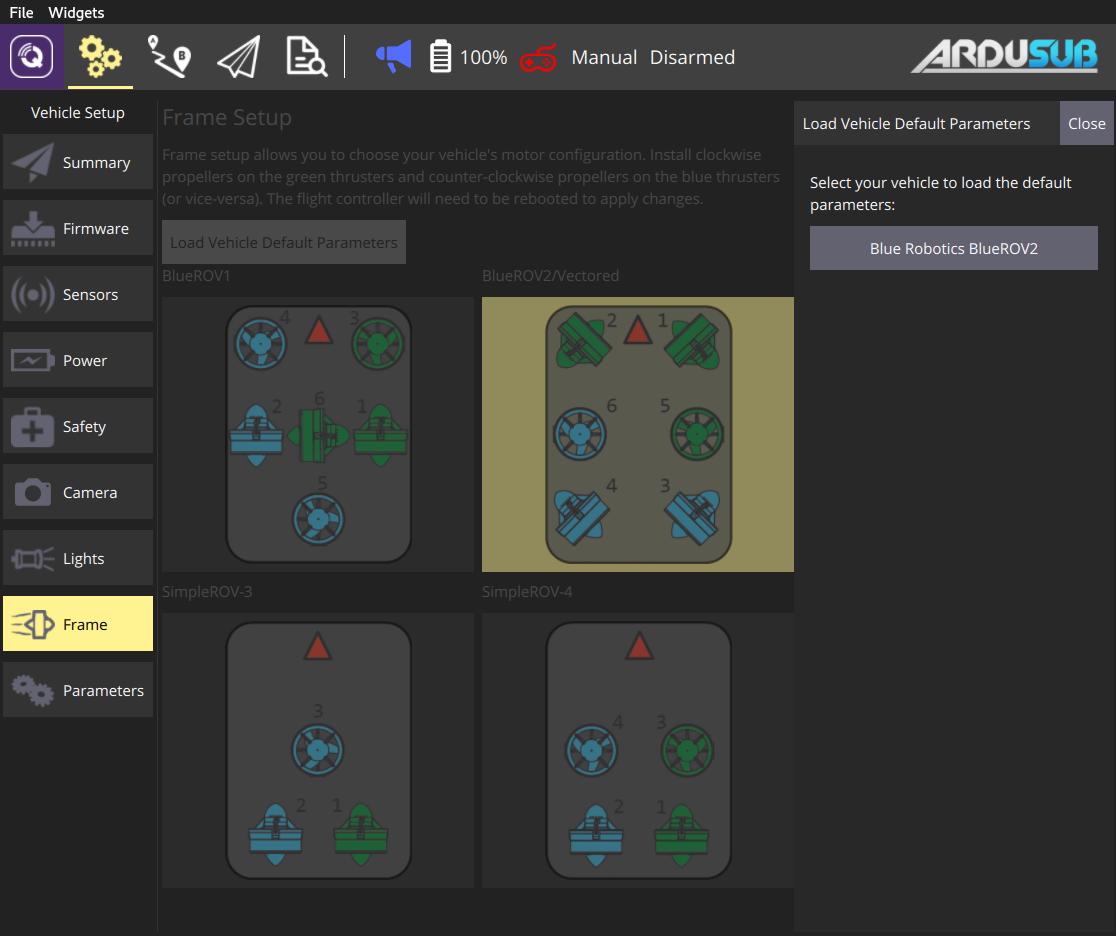
ArduSub机体设置
-
打开机体设置界面
-
选择与您的载具匹配的载具类型
-
确保所有绿色推进器均具有顺时针方向的螺旋桨,所有蓝色推进器均具有逆时针方向的螺旋桨(反之亦然)

- 您也可以单击“加载载具默认参数”以加载ArduSub的默认参数集
PX4机体设置
-
打开机体设置界面
-
选择与您的机体相匹配的class种类,然后使用组中的下拉列表选择与您的车辆最相符的机体

-
上面的示例显示了从“ Quadrotor wide”种类中选择的3DR Iris Quadrotor机体
-
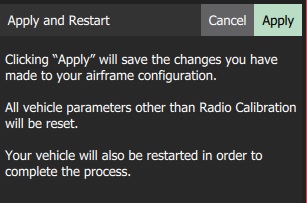
单击界面右上方的“应用并重新启动”按钮
-
在以下提示中单击“应用”以保存设置并重新启动载具/
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号