



















pixuav无人机入门教程-设置失控保护
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
pixuav无人机入门教程-设置失控保护
说明:
- 本教程介绍如何设置失控保护
操作步骤
-
首先确保使用的遥控器支持失控保护功能,本教程示例用的是乐迪AT9s遥控器
-
打开遥控器 -> 下拉着油门摇杆右侧的微调按钮至最小 -> 长按
mode键进入基础菜单 -> 进入到失控保护设置 -> 光标切换到油门-> 边下拉油门摇杆到最大,边长按PUSH按钮确认 -> 设置成功时,油门的百分比应该在3%左右 -> 返回到最上层界面,上拉着油门摇杆右侧的微调按钮,直接其值归零

-
设置完之后,重新在MissionPlanner校准遥控器
-
进入到
遥控器校准界面,下拉着油门摇杆右侧的微调按钮至最小,看下正常时候油门的最低值,把遥控器关闭,油门最低值会立即下降,一般要小于975。如果出现这种情况,表示遥控器的失控保护设置是成功的 -
设置APM的飞行模式,其中一定要有“RTL(返航)”和“Land(降落)”的飞行模式
-
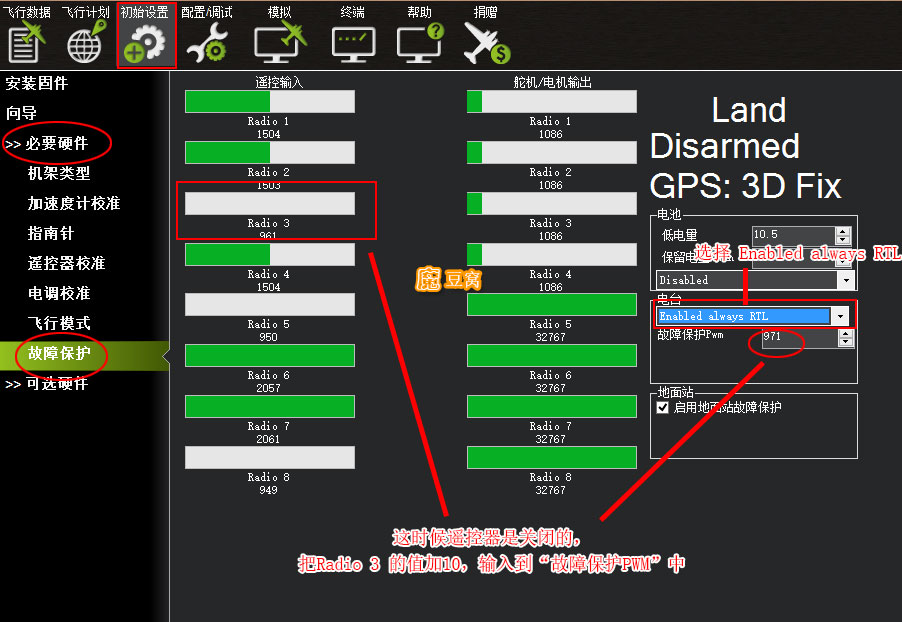
关闭遥控器的电源。打开主菜单“初始设置”的“必要硬件”中的“故障保护”。把图示所圈的地方,改为“Enabled always RTL”,意思是出现故障时候返航,也可以设置为“Enabled always Land”(降落)。由于这时候是关闭遥控器电源,能看到油门Radio 3的PWM值,把这个值加10后,填到“故障保护PWM”中。
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号