



















oak深度相机入门教程-识别车道线
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
说明:
-
介绍如何识别车道线
步骤:
-
进入目录depthai-experiments/gen2-lanenet
-
安装依赖
python3 -m pip install -r requirements.txt- 所需要的依赖
opencv-python
depthai==2.17.0.0
depthai-sdk
numpy
blobconverter==1.3.0- 使用视频运行程序
python3 main.py -v ./vids/solidWhiteRight.mp4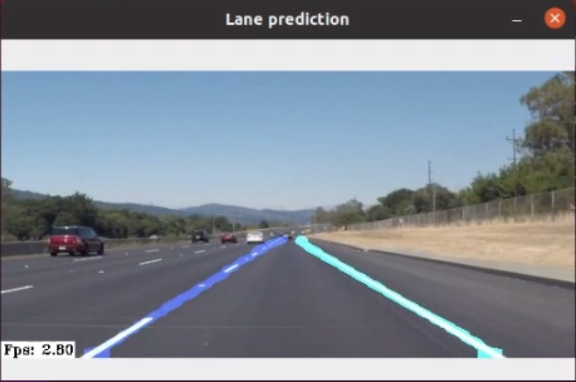
演示视频
<iframe height=498 width=100% src="//player.bilibili.com/player.html?aid=219727772&bvid=BV1g8411h75X&cid=879822471&page=1" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"> </iframe>纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号