



















Ailibot2仿真入门教程-gazebo-设计简单的gazebo场景
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
文章说明
- 本教程主要介绍如何在gazebo上设计新的gazebo场景
- 测试环境:Ubuntu 20.04 + Gazebo11
操作步骤
- 启动gazebo
$ gazebo- 按下
ctrl+b打开模型编辑界面

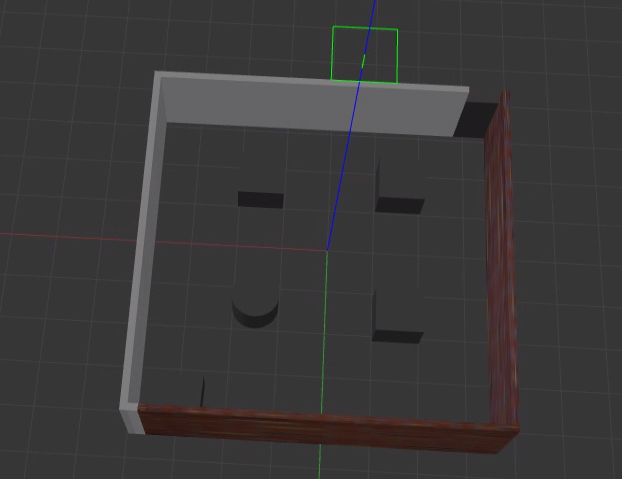
- 通过拖动侧边栏的
Wall到白色编辑框,此处简单围了7x8m的空间作为测试

-
可根据需要添加相应的特征
-
点击右上角
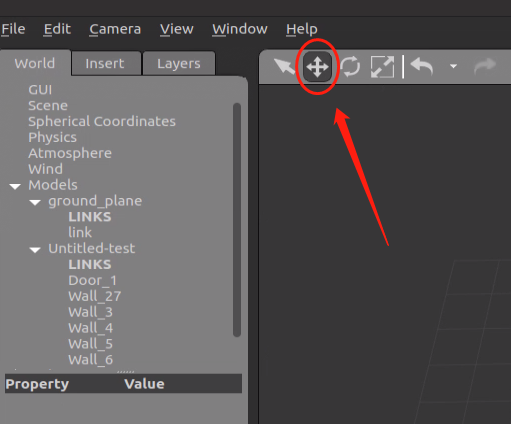
File->Save的按钮保存模型,同时退出模型编辑模式 -
当前回到主界面,点击上方十字按钮可以移动模型
- 同时可添加一些简单的障碍
- 最后点击右上角
File->Save World As到ailibot2_gazebo/worlds文件夹下,且命名为test.world
参考资料
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号