



















TK1入门教程硬件篇-外接双目相机ZED
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
TK1入门教程硬件篇-外接双目相机ZED
说明:
- 介绍如何在TK1上使用双目相机ZED
准备:
- CUDA 6.5 R.21
- openCV4tegra 2.4.10
步骤:
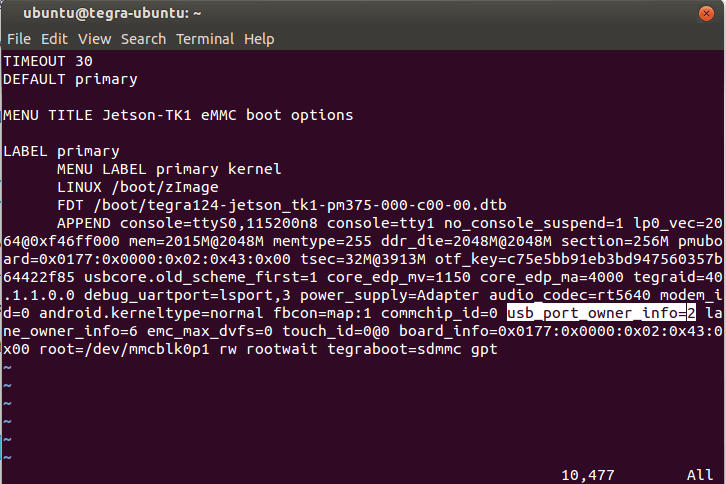
- 激活USB3.0:
$ sudo vi /boot/extlinux/extlinux.conf
# Replace ‘usb_port_owner_info=0‘ by ‘usb_port_owner_info=2‘.
# Save and exit (*:wq*)- 效果图如下:
-
ZED需要USB3.0端口,TK1默认是USB2.0
-
安装ZED SDK:
-
下载地址:https://www.stereolabs.com/developers/#download_anchor
-
新建目录
mkdir ~/zed,下载后放在此目录: -
运行:
$ cd ~/zed
$ chmod +x ZED_SDK_JTK1_v*.run
$ ./ZED_SDK_JTK1_v*.run
# Accept the statement and follow installation instruction.- zed安装在/usr/local/zed目录
获取图像和深度图:
- 学习例子:博客 或 Github
- Hello World例子
- opencv例子
检测带深度信息:
参考:
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号