



















TK1入门教程硬件篇-连接LIDAR-Lite v2
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
TK1入门教程硬件篇-连接LIDAR-Lite v2
说明:
- 介绍如何在TK1上通过I2C使用LIDAR-Lite v2
硬件:
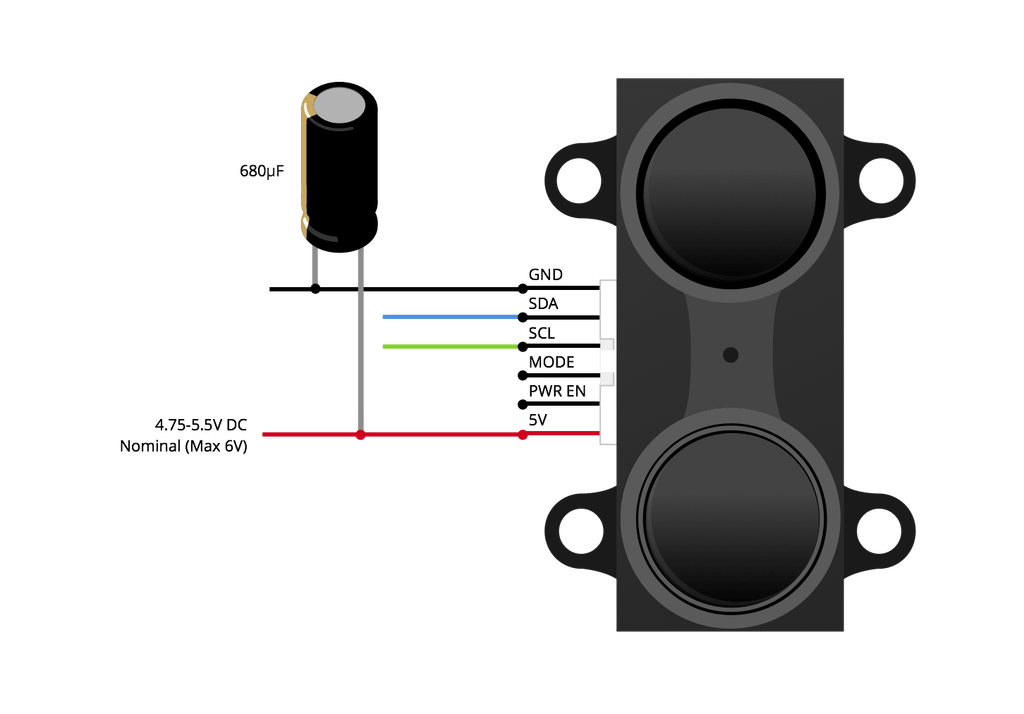
- 注意:LIDAR-Lite v2 运行需5V, I2C 为 3.3V.
- 连线图:
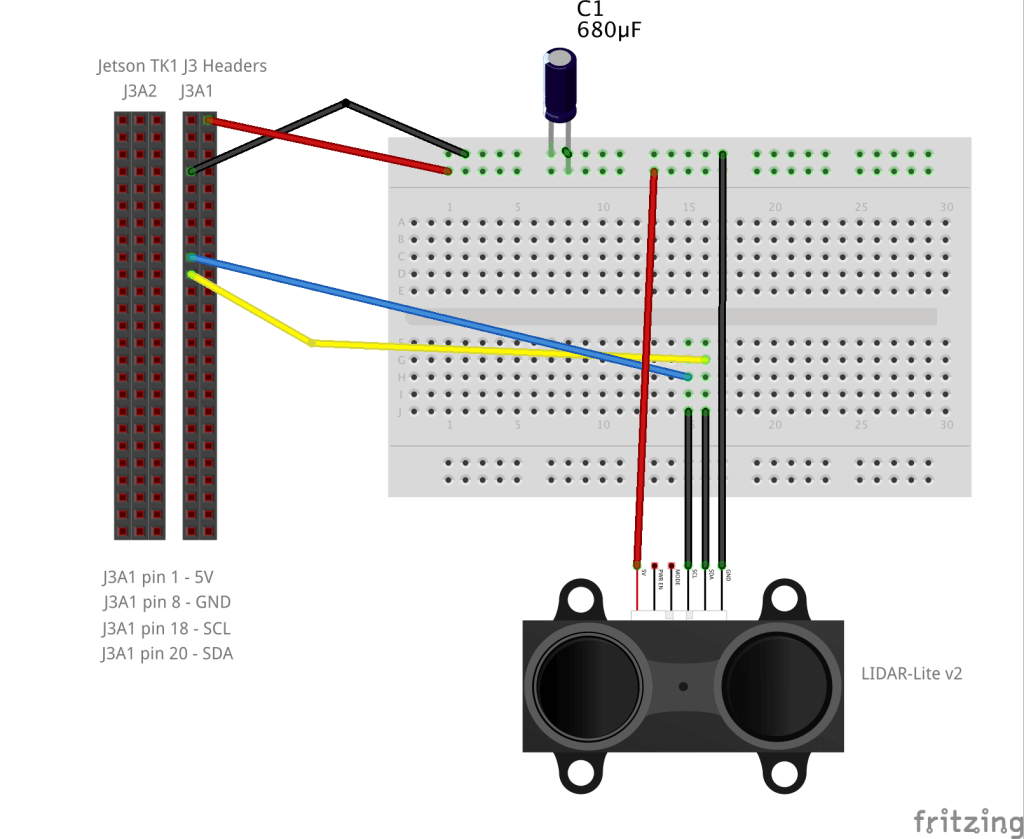
- 连线口:
LIDAR-Lite v2 5V to J3A1 Pin 1 (+)
LIDAR-Lite v2 GND J3A1 Pin 8 (-)
LIDAR-Lite v2 SCL J3A1 Pin 18 (C)
LIDAR-Lite v2 SDA J3A1 Pin 20 (D)- 建议在5V和GND之间+使用680 uF电容
软件:
- 安装工具
$ sudo apt-get install libi2c-dev i2c-tools- 检测雷达地址:
$ sudo i2cdetect -y -r 1测试:
- 下载编译例子:
$ git clone https://github.com/jetsonhacks/JHLidarLite_V2.git
$ cd JHLidarLite_V2
$ cd example
$ make- 执行例子:
$ sudo ./example- 该示例程序将显示测得的距离,前一次测量的距离,和速度(变化率)
- 你如果手持雷达移动,显示-1的话,可能TK1没正确识别雷达。
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号