



















Turtlebot3与仿真-ROS2
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流

说明
- 介绍如何在ROS2中使用Turtlebot3进行Gazebo仿真
- 测试环境:Ubuntu 18.04 + ROS2 Dashing
前提准备
- 对应的系统和软件安装:安装参考链接
操作步骤
- 新终端,环境设置
$ echo 'export GAZEBO_MODEL_PATH=$GAZEBO_MODEL_PATH:~/turtlebot3_ws/src/turtlebot3/turtlebot3_simulations/turtlebot3_gazebo/models' >> ~/.bashrc
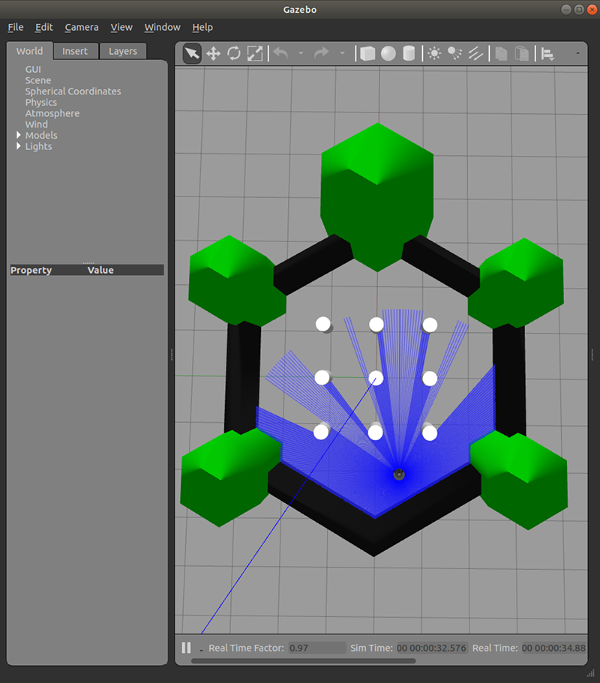
$ source ~/.bashrc- 新终端,加载TB3到gazebo的虚拟环境中
$ ros2 launch turtlebot3_gazebo turtlebot3_world.launch.py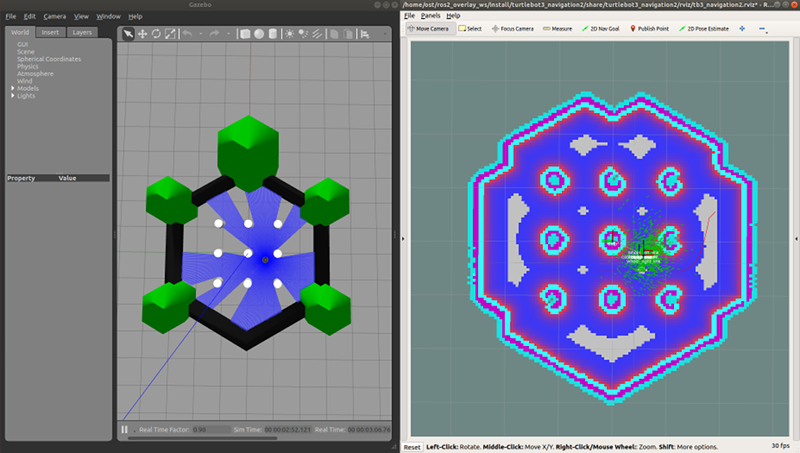
- 新终端,启动 Cartographer 建图程序
$ ros2 launch turtlebot3_cartographer cartographer.launch.py use_sim_time:=True- 新终端,启动键盘控制节点
$ ros2 run turtlebot3_teleop teleop_keyboard- 新终端,保存地图
$ ros2 run nav2_map_server map_saver -f ~/map-
关闭此前打开的建图程序和键盘控制程序
-
新终端,运行navigation2导航程序
$ ros2 launch turtlebot3_navigation2 navigation2.launch.py use_sim_time:=True map:=$HOME/map.yaml-
点击
2D Pose Estimate按钮进行初始化位置 -
点击
2D New Goal按钮给定一个目标坐标及到达时的方向
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流