



















Turtlebot3-waffle入门教程-OpenCR安装
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流

Turtlebot3-waffle入门教程-OpenCR安装
说明
-
介绍如何为OpenCR板安装ROS固件
-
OpenCR的安装方法有两种
- 一是使用shell脚本上传预构建好的固件
- 二是通过Arduino IDE构建官方提供的源代码且上传shell脚本(推荐)
-
该方法已在
Ubuntu 16.04、Ubuntu Mate、Linux Mint和Raspbian系统上测试通过 -
将OpenCR连接到远程PC或者树莓派后执行以下命令
$ export OPENCR_PORT=/dev/ttyACM0
$ export OPENCR_MODEL=waffle
$ rm -rf ./opencr_update.tar.bz2
$ wget https://github.com/ROBOTIS-GIT/OpenCR-Binaries/raw/master/turtlebot3/ROS1/latest/opencr_update.tar.bz2 && tar -xvf opencr_update.tar.bz2 && cd ./opencr_update && ./update.sh $OPENCR_PORT $OPENCR_MODEL.opencr && cd ..
- 出现
jump_to_fw字样代表烧录成功
Arduino IDE(替代)
-
USB端口设置
-
使OpenCR USB端口能够在没有root权限的情况下上传Arduino IDE程序
-
执行如下命令:
$ wget https://raw.githubusercontent.com/ROBOTIS-GIT/OpenCR/master/99-opencr-cdc.rules
$ sudo udevadm control --reload-rules
$ sudo udevadm trigger-
编译器设置
-
由于OpenCR库是为32位平台构建的,64位PC需要用于Arduino IDE的32位编译器相关内容:
-
执行如下命令:
$ sudo apt-get install libncurses5-dev:i386-
安装Arduino IDE
-
OpenCR需Arduino IDE 1.16.0及之后的版本
-
从官方的arduino主页下载最新版本,地址:https://www.arduino.cc/en/Main/Software
-
将下载的文件解压缩到所需的文件夹比如用户的根目录下tools,并从终端执行安装文件。如下:
$ mkdir ~/tools && cd ~/tools
$ wget https://www.arduino.cc/download_handler.php?f=/arduino-1.8.3-linux64.tar.xz
$ tar -xvf arduino-1.8.3-linux64.tar-
运行Arduino IDE
-
在linux下,新终端执行:
$ arduino- 或直接运行
$ ./tools/arduino-1.8.3/arduino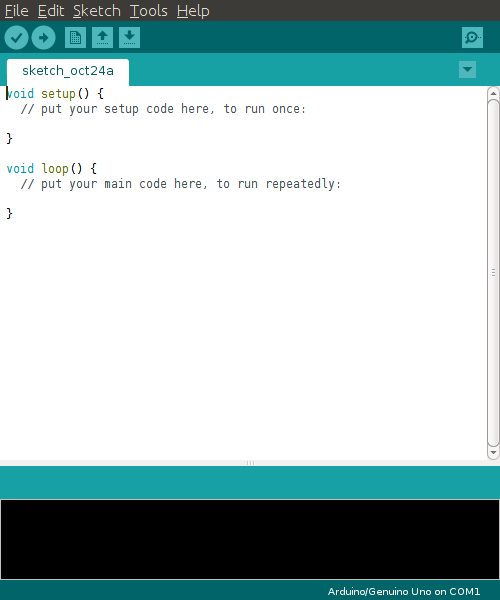
-
将OpenCR板移植到Arduino IDE
-
(1)增加Boards Manager
-
运行IDE,点击
File→Preferences, 复制如下内容到Additional Boards Manager URLs:
https://raw.githubusercontent.com/ROBOTIS-GIT/OpenCR/master/arduino/opencr_release/package_opencr_index.json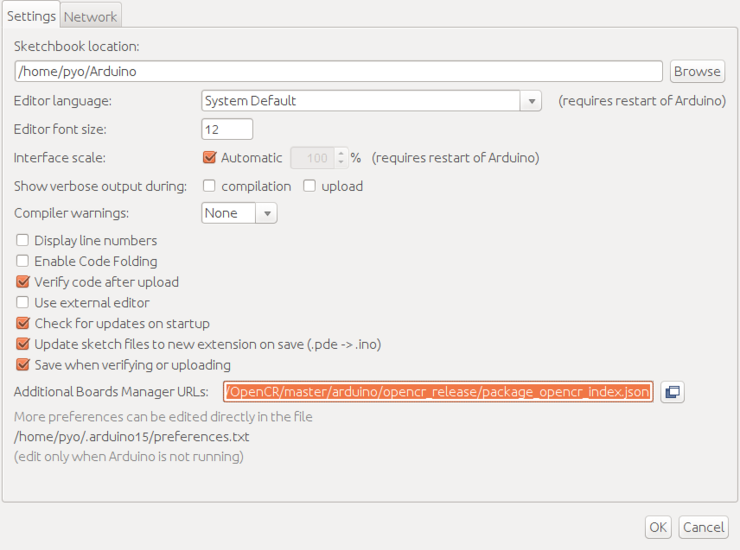
-
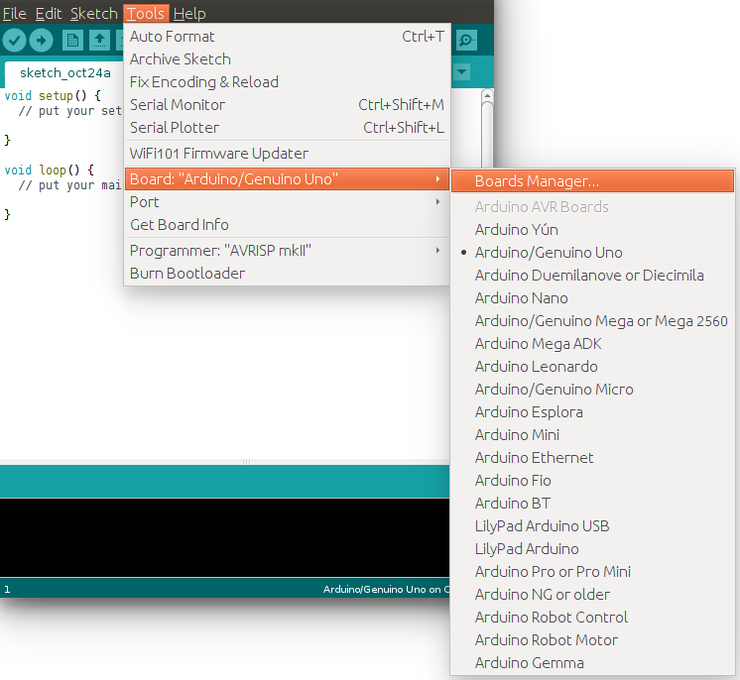
(2)通过Boards Manager安装OpenCR软件包
-
点击
Tools→Board→Boards Manager -
图示:
- 在文本框中键入OpenCR以查找包。找到OpenCR by ROBOTIS后,点击Install.
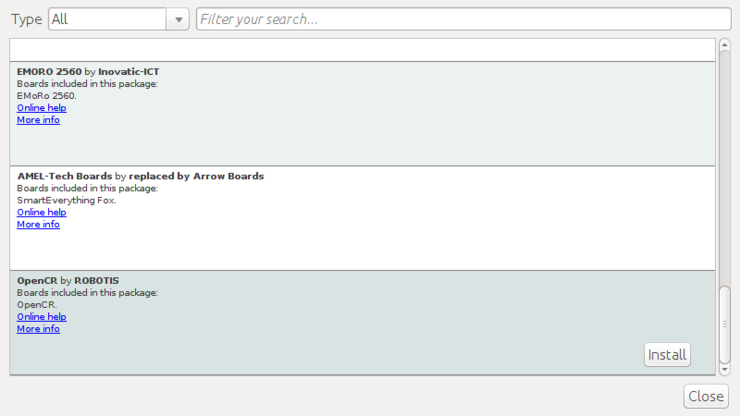
- 安装后,将显示“INSTALLED”
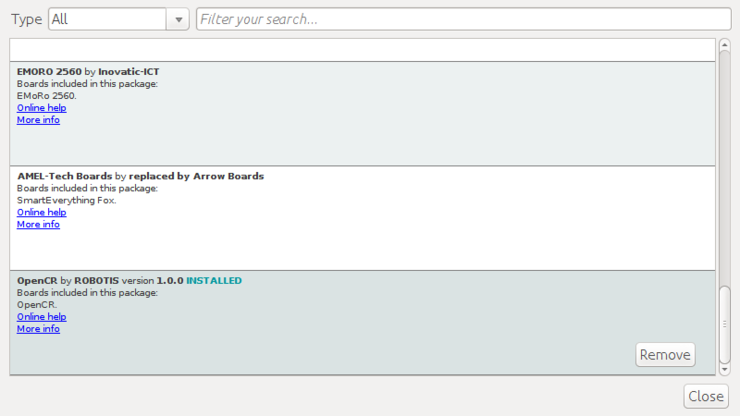
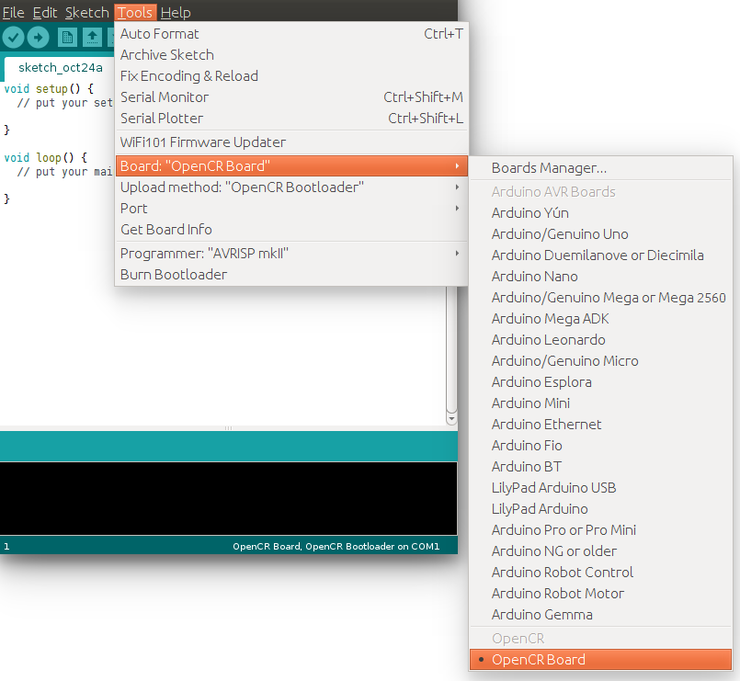
- OpenCR Board列在Tools → Board 中。
-
注意:可能第一次会下载会不成功,可以先安装老版本,在安装新版本。
-
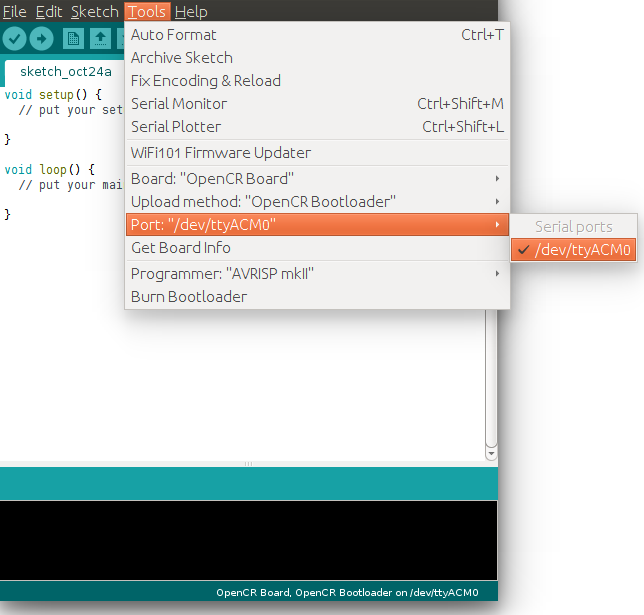
(3)端口设置
-
此步骤显示程序上传的端口设置。
-
OpenCR应通过USB端口连接到PC和OpenCR板。
-
选择
Tools→Port→/dev/ttyACM0
-
/dev/ttyACM0的值可能会根据不同PC环境有差异 -
OpenCR烧录ROS固件
-
将TurtleBot3固件添加到OpenCR中
-
用于ROS的OpenCR固件(或源)是控制ROS中的Dynamixel和传感器。
-
固件位于OpenCR示例中,也由board manager下载。
-
点击
File→Examples→turtlebot3→turtlebot3_burger→turtlebot3_core -
点击
Upload上传到OpenCR板
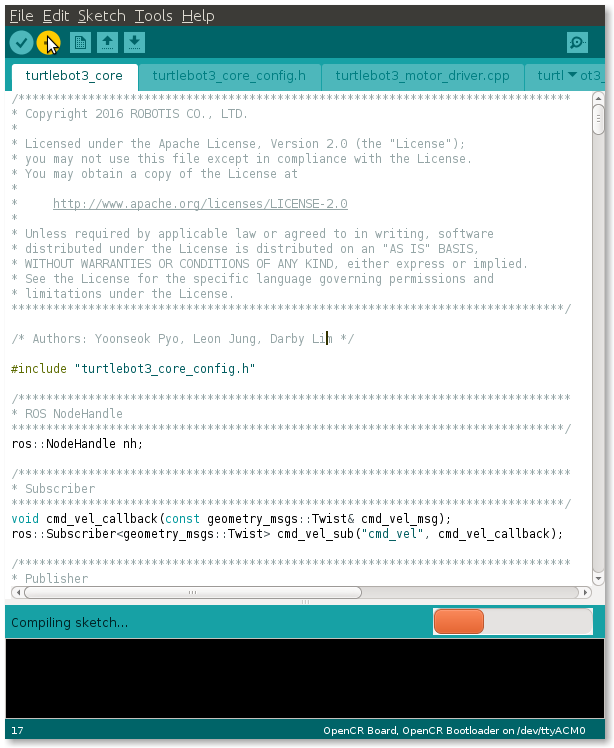
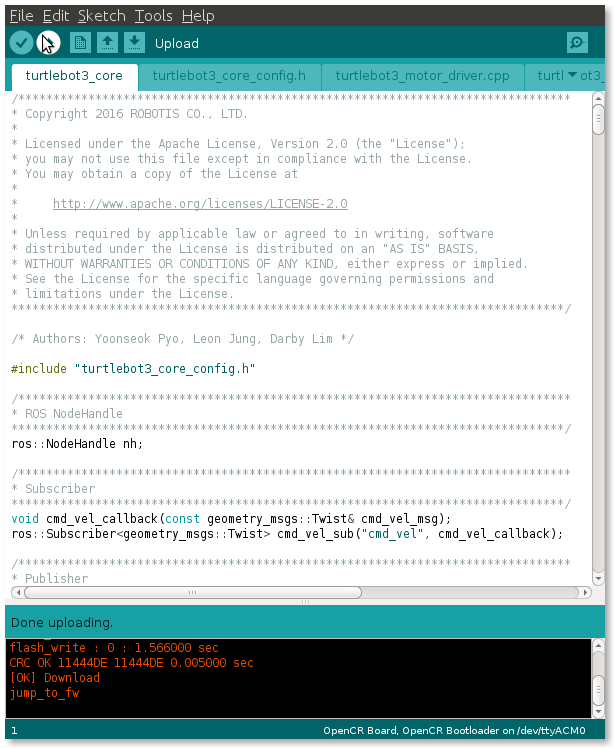
- 出现
jump_to_fw字样代表烧录成功
演示视频
<iframe height=498 width=100% src="//player.bilibili.com/player.html?aid=66707155&cid=115687147&page=1" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"> </iframe>纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流