



















Turbot2入门教程-应用-实现自主导航
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
Turbot2入门教程-应用-实现自主导航
说明:
- 介绍如何在turbot2上实现自主导航
步骤:
注意:启动tk1开发板后应该重拔usb-hub,否则可能会导致无法正常使用kinect V2的情况
- 主机,新终端执行,启动底盘
roslaunch turbot_bringup minimal.launch- 主机,新终端执行,启动kinect2
roslaunch turtlebot_navigation kinect2_cpu.launch- 主机,新终端执行,启动amcl
roslaunch turtlebot_navigation kinect2_amcl_demo.launch map_file:=/home/ubuntu/map/tk1-kinect2-gmapping-newoffice.yaml- 从机,新终端,启动rviz
roslaunch turtlebot_rviz_launchers view_navigation.launch --screen- 效果如下:

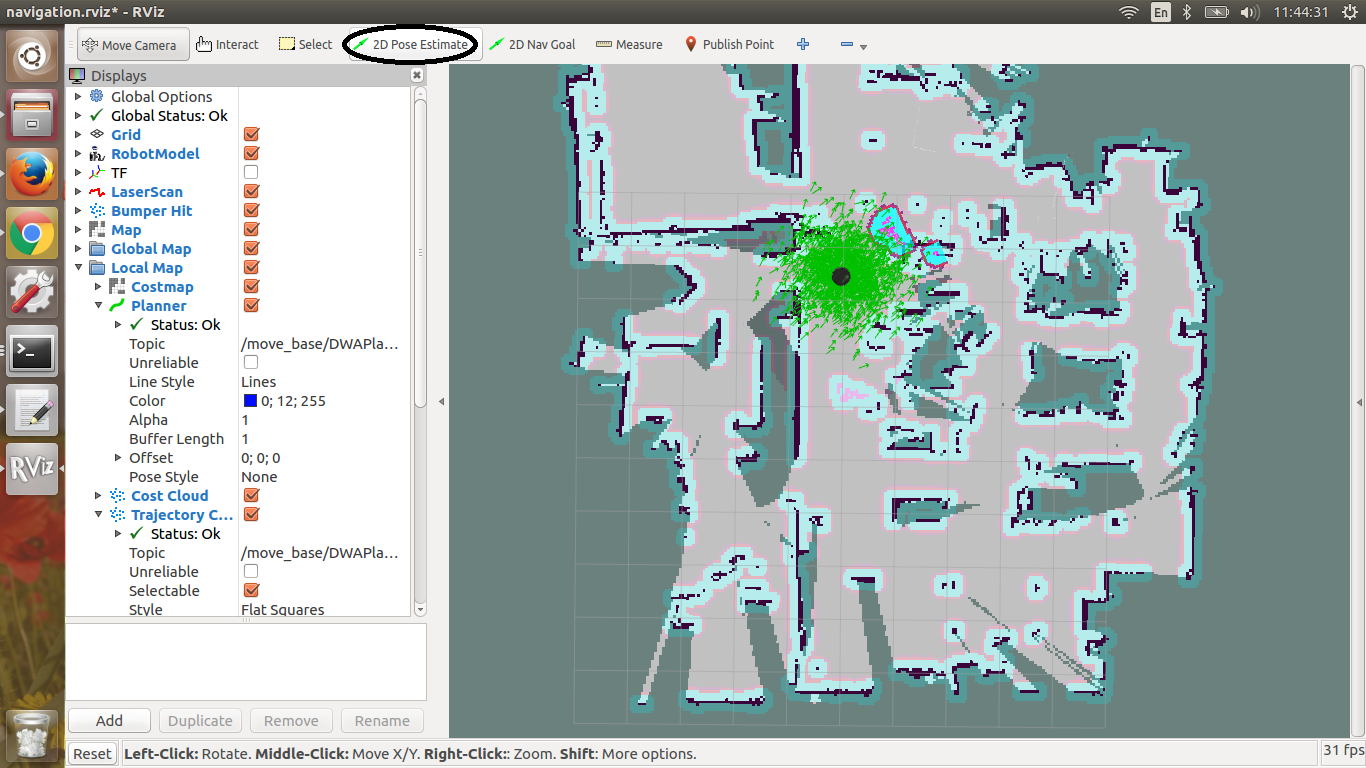
- 初始化位置,选择2D Pose Estimate,标注机器人在地图上的位置和方向,按住鼠标左键拉向某个方向,如图:
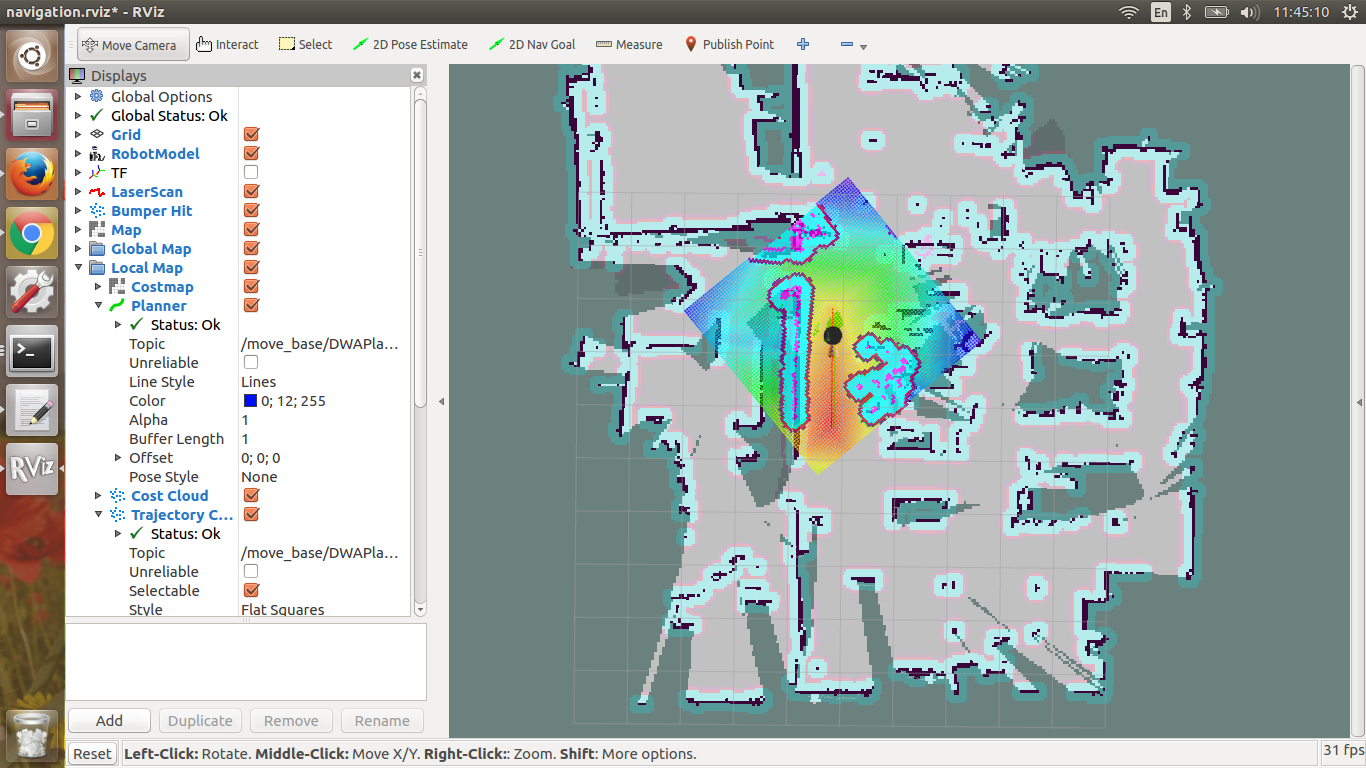
- 设置目标位置,选择“2D Nav Goal”, 标注机器人将要到达地图上的位置和方向,按住鼠标左键拉向某个方向,如图:

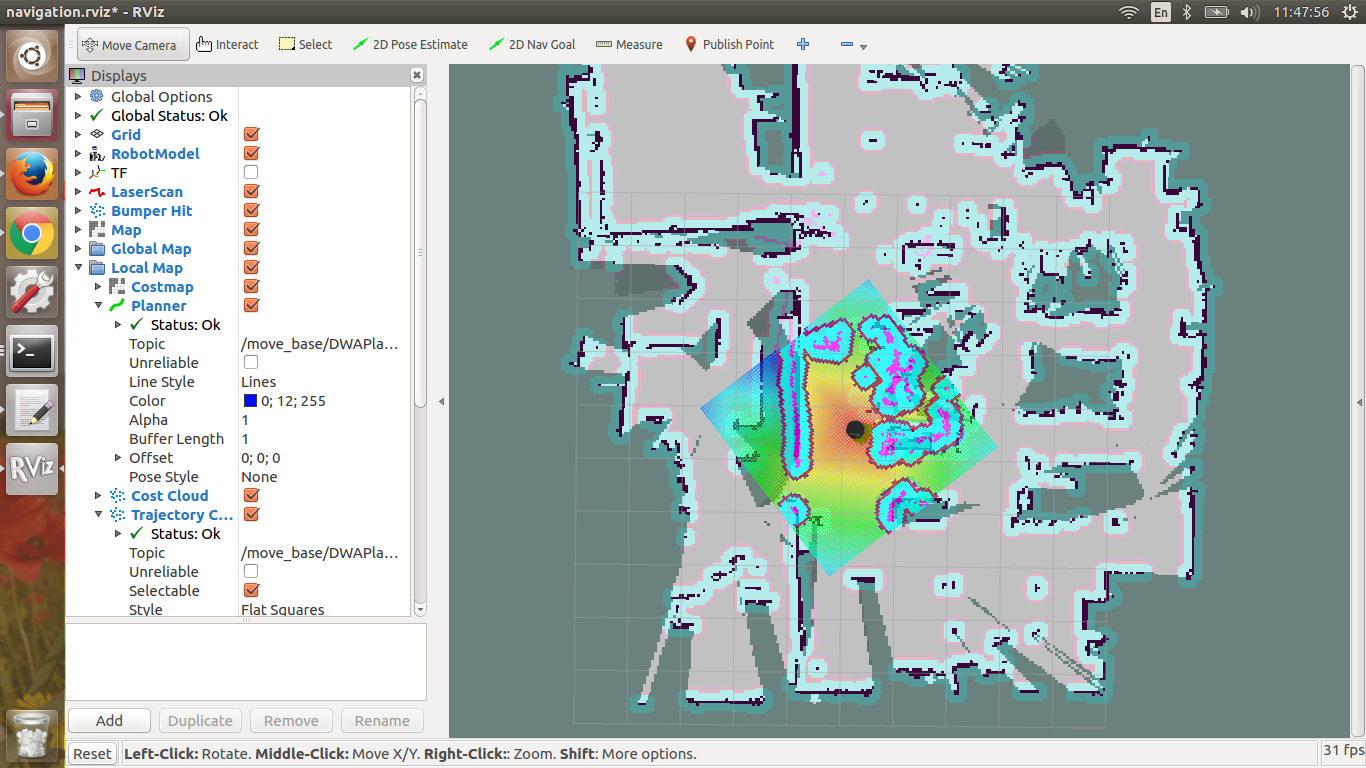
- 自动到达目标,如图:
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号