



















ROS与QT语言入门教程-按钮控制小乌龟运动
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
ROS与QT语言入门教程-按钮控制小乌龟运动
说明
- 在ROS QT GUI模板的基础上,实现使用按钮控制小海龟运动,向前,向后,向左,向右
ui界面
main_window.ui文件:拖入四个按钮控件,将对象名分别改为up,down,left、right
编写节点
**qnode.hpp**头文件
public:
//void run();
void up();
void down();
void left();
void right();代码解释:
- 注释掉run()函数,声明小海龟向前up()函数,向后down()函数,向左left()函数,向右right()函数
**qnode.cpp**源文件
#include <geometry_msgs/Twist.h>
namespace qtros{
bool QNode::init()
{
chatter_publisher = n.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel", 1000);
}
bool QNode::init(const std::string &master_url, const std::string &host_url)
{
chatter_publisher = n.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel", 1000);
}
}
void QNode::up()
{
ros::Rate loop_rate(1);
if(ros::ok())
{
geometry_msgs::Twist msg;
msg.linear.x = 1.0;
msg.angular.z = 0.0;
chatter_publisher.publish(msg);
ros::spinOnce();
loop_rate.sleep();
}
log(Info,std::string("up"));
}
void QNode::down()
{
ros::Rate loop_rate(1);
if(ros::ok())
{
geometry_msgs::Twist msg;
msg.linear.x = -1.0;
msg.angular.z = 0.0;
chatter_publisher.publish(msg);
ros::spinOnce();
loop_rate.sleep();
}
log(Info,std::string("down"));
}
void QNode::left()
{
ros::Rate loop_rate(1);
if(ros::ok())
{
geometry_msgs::Twist msg;
msg.linear.x = 0.0;
msg.angular.z = 1.0;
chatter_publisher.publish(msg);
ros::spinOnce();
loop_rate.sleep();
}
log(Info,std::string("left"));
}
void QNode::right()
{
ros::Rate loop_rate(1);
if(ros::ok())
{
geometry_msgs::Twist msg;
msg.linear.x = 0.0;
msg.angular.z = -1.0;
chatter_publisher.publish(msg);
ros::spinOnce();
loop_rate.sleep();
}
log(Info,std::string("right"));
}代码解释:
- 修改发布者订阅的话题,/turtle1/cmd_vel
- 定义小海龟向前,向后,向左,向右的函数
- 修改msg.linear.x和msg.angular.z的值,改变小海龟运动的方向和速度
- 注释掉void QNode::run()函数
编写主窗口
main_window.hpp头文件
public Q_SLOTS:
void on_up_clicked();
void on_down_clicked();
void on_left_clicked();
void on_right_clicked();代码解释:
- 主窗口下,声明四个按键的槽函数
main_window.cpp源文件
void tortoise::MainWindow::on_up_clicked()
{
qnode.up();
}
void tortoise::MainWindow::on_down_clicked()
{
qnode.down();
}
void tortoise::MainWindow::on_left_clicked()
{
qnode.left();
}
void tortoise::MainWindow::on_right_clicked()
{
qnode.right();
}代码解释:
- 定义四个按键的槽函数,并且让它调用qnode对应的函数,让小海龟运动
编译运行:
- 启动ros master
$ roscore- 启动小海龟节点
$ rosrun turtlesim turtlesim_nodes-
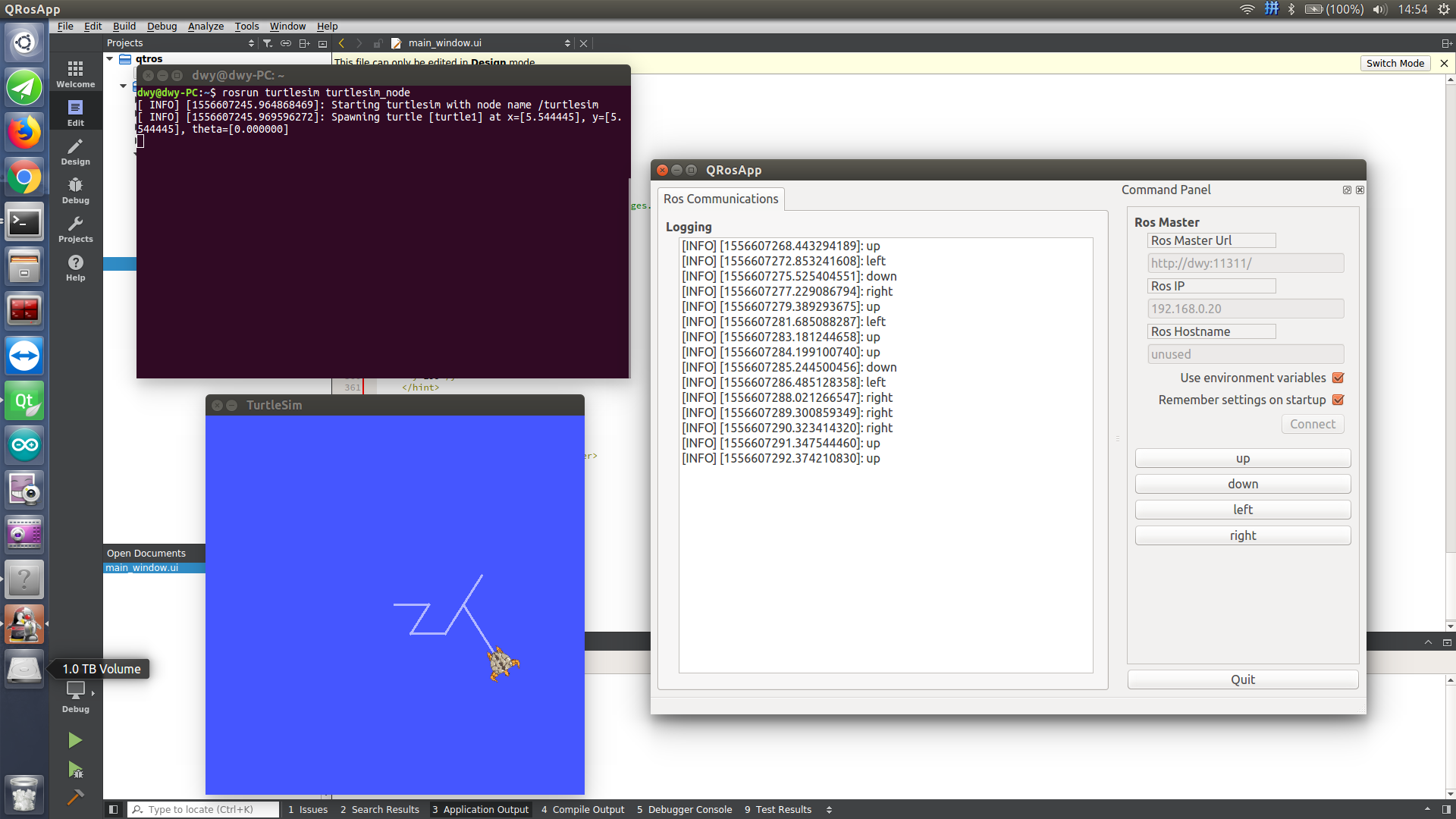
运行qt程序
-
点击up、down、left、right按钮,小海龟向前、向后、向左、向右
参考资料
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号