



















TurtleBot3入门教程#ROS2版#-雷达测试
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流

文章说明
- 本教程主要介绍如何测试雷达
相关设备
- TB3套件:采购地址
操作步骤
-
测试前请检查机器上使用的雷达,然后根据当前机器使用的雷达来执行对应的命令
-
lds-01雷达
-
lds-02雷达
-
[TurtleBot] 单独启动雷达
# 启动lds-01雷达
$ ros2 launch hls_lfcd_lds_driver hlds_laser.launch.py
# 启动lds-02雷达
$ ros2 launch ld08_driver ld08.launch.py- [Remote PC] 检查是否有话题数据输出
$ ros2 topic echo /scan若没有内容输出,则需要检查雷达是否正常启动和PC端是否配置好环境,比如ROS ID或者是否在同一网段
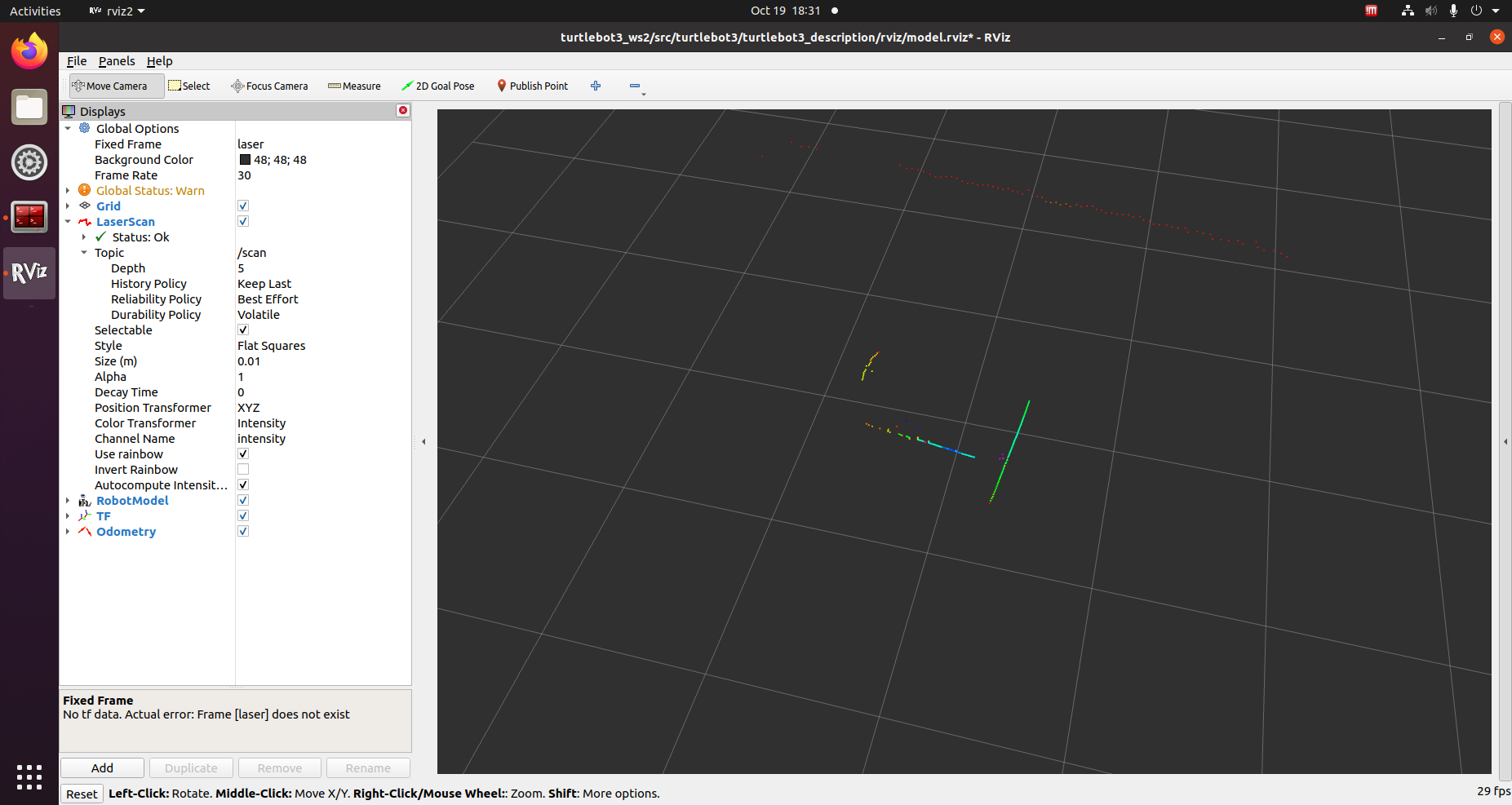
- [Remote PC] 启动RViz2
$ rviz2-
如果使用的是
lds-01雷达默认的frame为laser,lds-02雷达则为base_scan -
将RViz2左侧边栏的
Displays窗口的Fixed Frame一项的值改为laser或base_scan -
点击
Add按钮,添加LaserScan显示项 -
同时设置
Topic项为/Scan -
效果如下图所示
FAQ
问题1:RViz2提示QoS不兼容
[WARN] [1735115926.697536225] [rviz]: New publisher discovered on topic '/scan', offering incompatible QoS. No messages will be sent to it. Last incompatible policy: RELIABILITY_QOS_POLICY- 解决方法:检查QOS,确保QOS匹配,在RViz2中
LaserScan->Topic->Reliability policy和Durability policy这两项设置与发布的qos对应
$ ros2 topic info /scan -v
Type: sensor_msgs/msg/LaserScan
Publisher count: 1san
Node name: ld08_driver
Node namespace: /
Topic type: sensor_msgs/msg/LaserScan
Endpoint type: PUBLISHER
GID: 01.0f.d7.f7.7f.09.fa.d6.00.00.00.00.00.00.12.03.00.00.00.00.00.00.00.00
QoS profile:
Reliability: BEST_EFFORT
History (Depth): UNKNOWN
Durability: VOLATILE
Lifespan: Infinite
Deadline: Infinite
Liveliness: AUTOMATIC
Liveliness lease duration: Infinite
Subscription count: 1
Node name: rviz
Node namespace: /
Topic type: sensor_msgs/msg/LaserScan
Endpoint type: SUBSCRIPTION
GID: 01.0f.24.7c.8c.11.84.ca.00.00.00.00.00.00.1c.04.00.00.00.00.00.00.00.00
QoS profile:
Reliability: BEST_EFFORT
History (Depth): UNKNOWN
Durability: VOLATILE
Lifespan: Infinite
Deadline: Infinite
Liveliness: AUTOMATIC
Liveliness lease duration: Infinite纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流