



















TurtleBot3入门教程#ROS2版#-自主导航
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流

文章说明
- 本教程主要介绍如何使用TB3进行自主导航
相关设备
- TB3套件:采购地址
操作步骤
- [Turtlebot] 启动TB3
$ ros2 launch turtlebot3_bringup robot.launch.py- [Remote PC] 启动导航程序
$ ros2 launch turtlebot3_navigation2 navigation2.launch.py map:=$HOME/map.yaml-
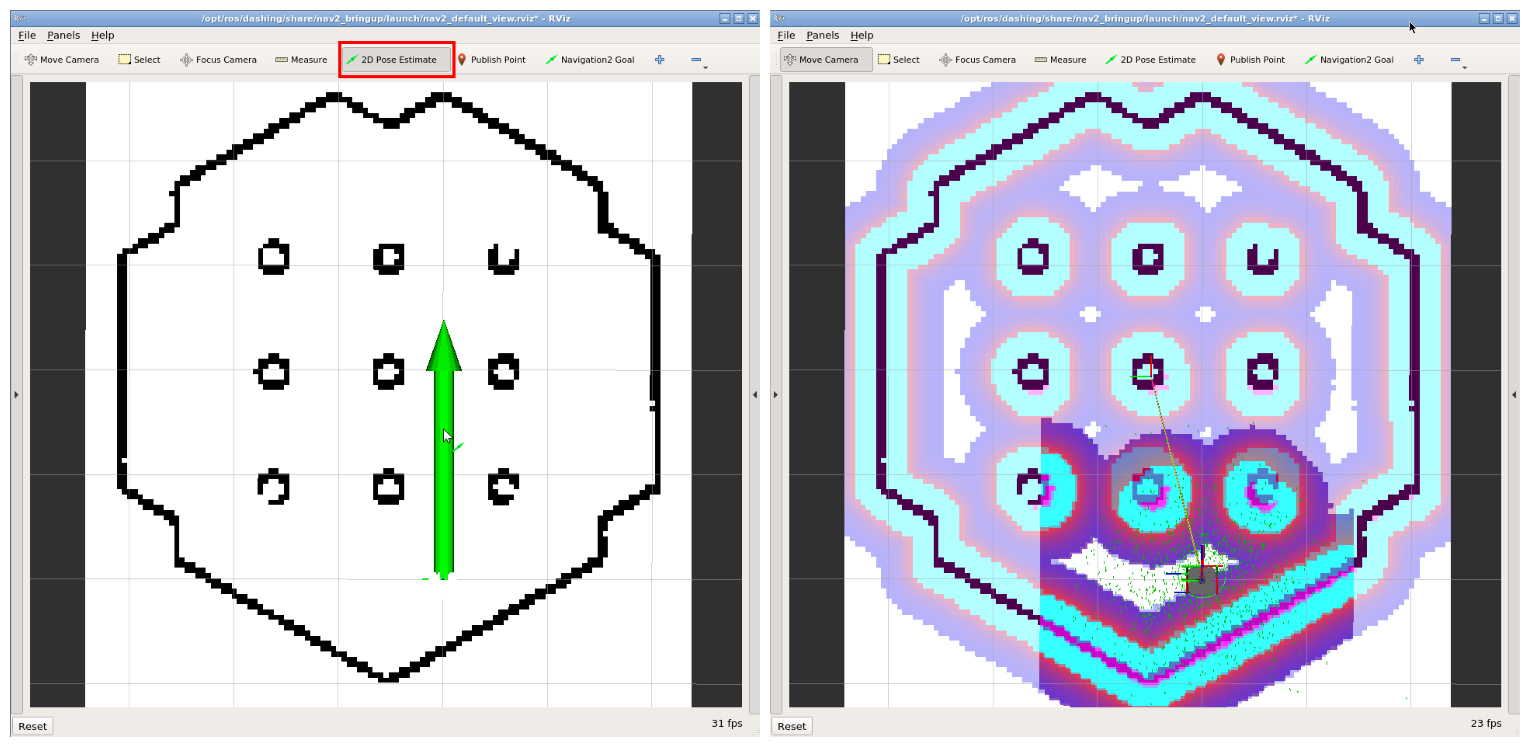
初始化TB3的位姿,在Rviz上点击
2D Pose Estimate,根据当前TB3实际位置在Rviz上的地图使用绿色的箭头初始化对应的位置与方向 -
Rviz上雷达数据的轮廓需与地图上的黑色的边界重合,同时匹配上实际环境
- [Remote PC] 启动键盘控制节点
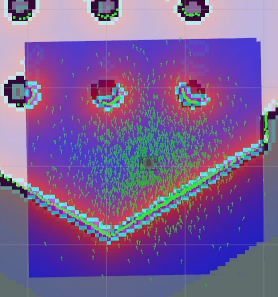
$ ros2 run turtlebot3_teleop teleop_keyboard- 稍微来回移动机器人以收集周围环境信息并缩小机器人在地图上的预估位置,效果如下图显示
-
此时需要使用
Ctrl+C命令终止终止键盘控制节点,以免导航时键盘控制节点亦同时发布cmd_vel的值从而造成冲突 -
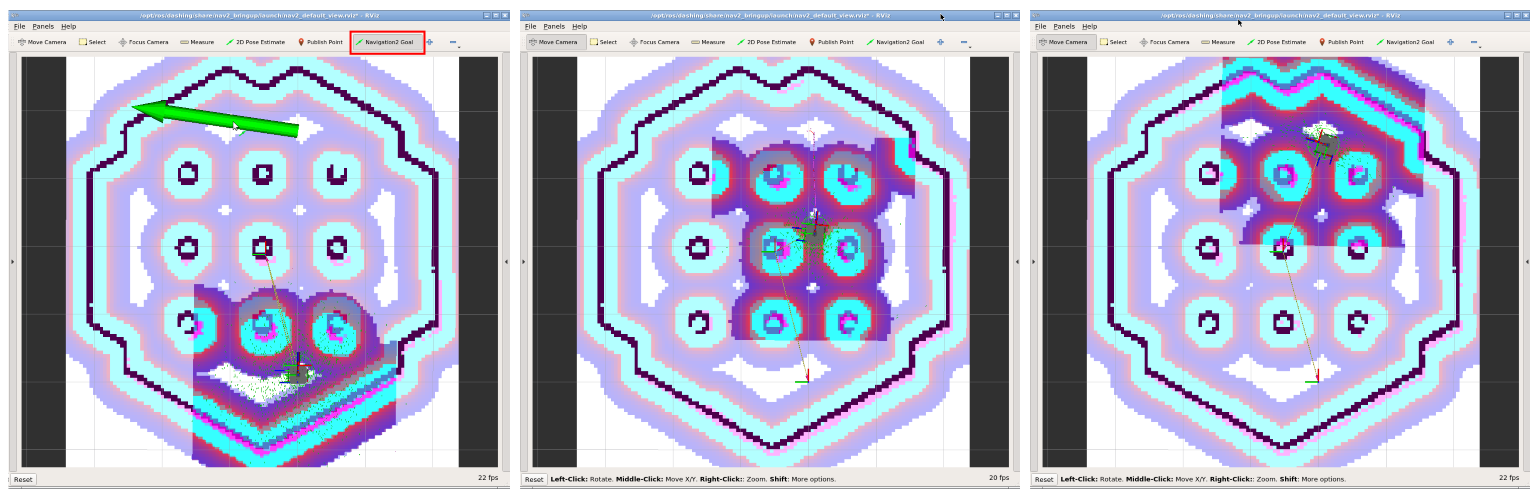
点击RViz上的
Navigation2 Goal按钮,来进行导航 -
点击地图上的一点来设置导航的目的地,绿色的箭头表示机器人到达目的地时的朝向
-
箭头的根部为目的地的
(x,y)坐标,箭头的朝向为角度θ -
一旦设置了 x、y、θ,机器人将立即开始移动到目的地
演示视频
<iframe height=498 width=100% src="//player.bilibili.com/player.html?aid=378867923&bvid=BV1wf4y1u72d&cid=432125863&page=1" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"> </iframe>纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流