



















Turtlebot3自动驾驶2020仿真教程-相机外标定
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流

Turtlebot3自动驾驶2020仿真教程-相机外标定
说明:
- 本教程主要介绍TB3自动驾驶2020的仿真中的相机外标定的校准和测试流程
- 仿真中是不需要进行相机的图像校准和内标定的
由于在该仿真环境是固定不变的,所以可以先使用程序默认配置好的参数进行测试,若测试效果不好再重新校准获取参数
校准
- 新终端,启动gazebo节点
$ roslaunch turtlebot3_gazebo turtlebot3_autorace_2020.launch- 新终端,启动相机的内标定
$ roslaunch turtlebot3_autorace_camera intrinsic_camera_calibration.launch- 新终端,启动相机外标定校准程序
$ roslaunch turtlebot3_autorace_camera extrinsic_camera_calibration.launch mode:=calibration- 新终端,打开可视化界面
$ rqt-
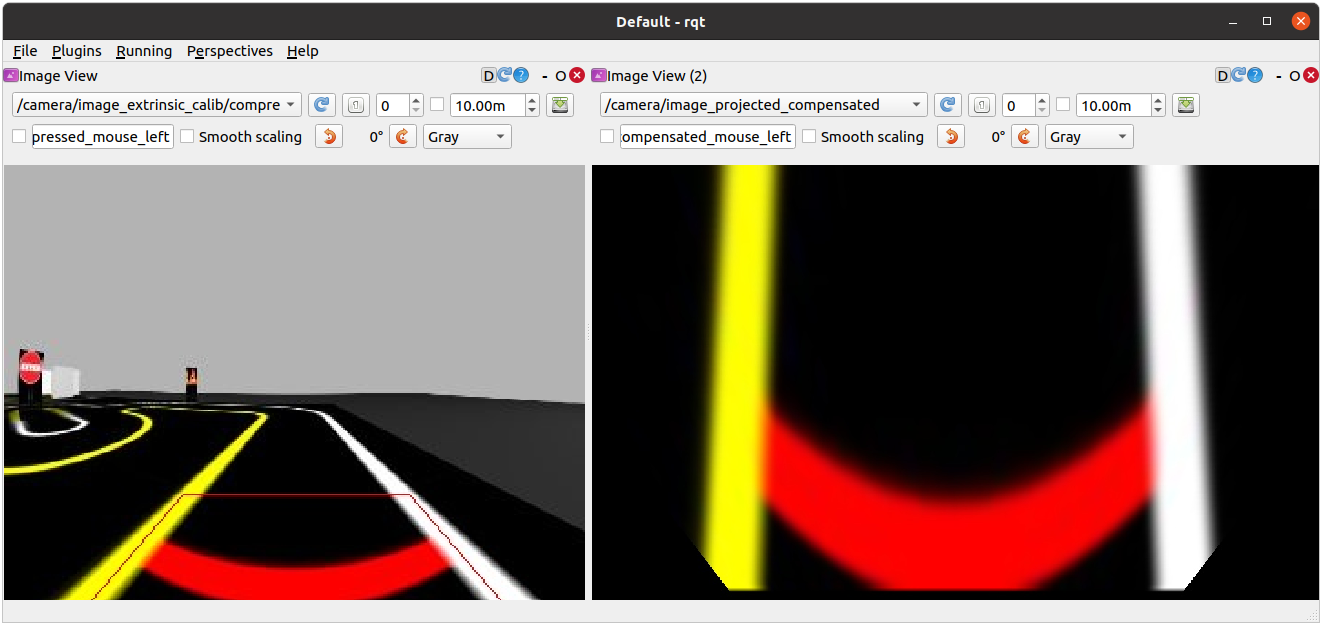
点击rqt界面的左上菜单栏
Plugins->Visualization->Image View,新建两个图像窗口 -
在左边的图像窗口订阅话题:
/camera/image_extrinsic_calib/compressed,右边窗口订阅话题:/camera/image_projected_compensated
- 新终端,打开rqt_reconfigure工具
$ rosrun rqt_reconfigure rqt_reconfigure-
调整
/camera/image_projection和/camera/image_compensation_projection的数值 -
使得红框的左右两条边尽可能处于车道的中心位置
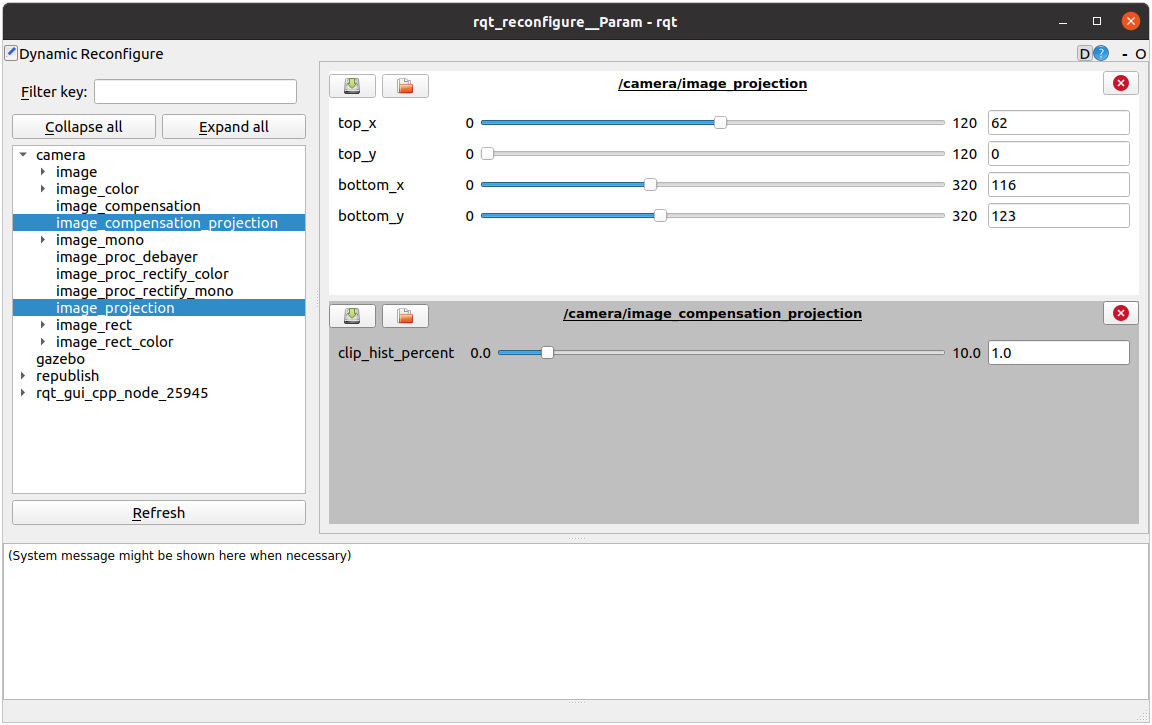
- 新终端,将调整完的值保存在
turtlebot3_autorace_camera/calibration/extrinsic_calibration/的compensation.yaml和projection.yaml文件内
$ rosed turtlebot3_autorace_camera compensation.yaml
---
camera:
extrinsic_camera_calibration:
clip_hist_percent: 1.0
$ rosed turtlebot3_autorace_camera projection.yaml
---
camera:
extrinsic_camera_calibration:
top_x: 59
top_y: 3
bottom_x: 114
bottom_y: 119测试
-
关闭前面打开的所有终端
-
新终端,启动gazebo节点
$ roslaunch turtlebot3_gazebo turtlebot3_autorace_2020.launch- 新终端,启动相机的内标定
$ roslaunch turtlebot3_autorace_camera intrinsic_camera_calibration.launch- 新终端,启动相机外标定校准程序
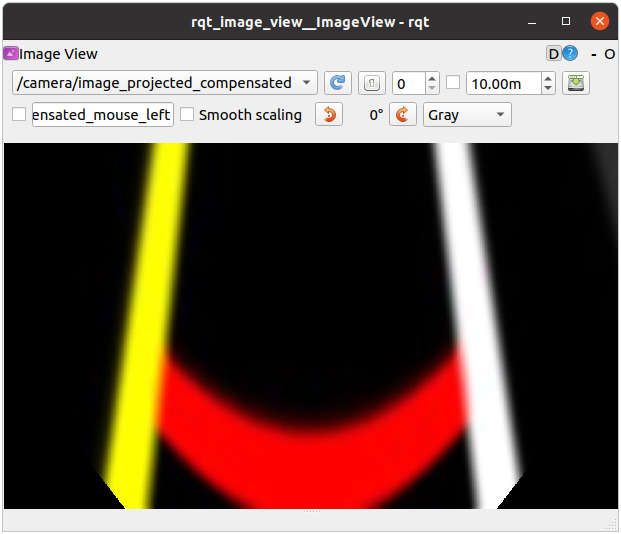
$ roslaunch turtlebot3_autorace_camera extrinsic_camera_calibration.launch- 新终端,打开可视化界面,订阅
/camera/image_compensated话题
$ rqt_iamge_view- 校准成功后,其图像如下图
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流