



















OpenManipulator-P机械臂入门教程-硬件介绍
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
说明
- 介绍OpenMANIPULATOR-P (RM-P60-RNH)机械臂的硬件组成以及相关的硬件参数
概述
-
OpenMANIPULATOR-P机械臂是一个完全开源的机器人操作平台
-
OpenMANIPULATOR-P机械臂基于ROS和OpenSource。使用者同时可以使用MoveIt!来控制它。
-
OpenMANIPULATOR-P机械臂同时支持Gazebo进行仿真
-
在ROS环境中,OpenMANIPULATOR-P机械臂支持在U2D2+U2D2电源转接板或者OpenCM板上使用;若在嵌入式系统上运行时,请准备OpenCM板。在这两种情况下,都要使用24V电源给DYNAMIXEL舵机供电。
硬件介绍
- 产品图

- 设备清单
| Item | Quantity |
|---|---|
| RM-P60-RNH | 1 |
| Manipulator Case | 1 |
| U2D2 | 1 |
| Extra cable set(4P, 2P) | 1 |
| 4P Ext Hub | 2 |
| Screw set (WB M2.5 and others) | 1 |
- 可选配件
| Item | Quantity |
|---|---|
| Gripper | 1 |
| Base Plate Frame | 1 |
- 硬件相关参数
| Item | OpenMANIPULATOR-P (RM-P60-RNH) |
|---|---|
| DOF | 6 |
| Payload | 3 kg |
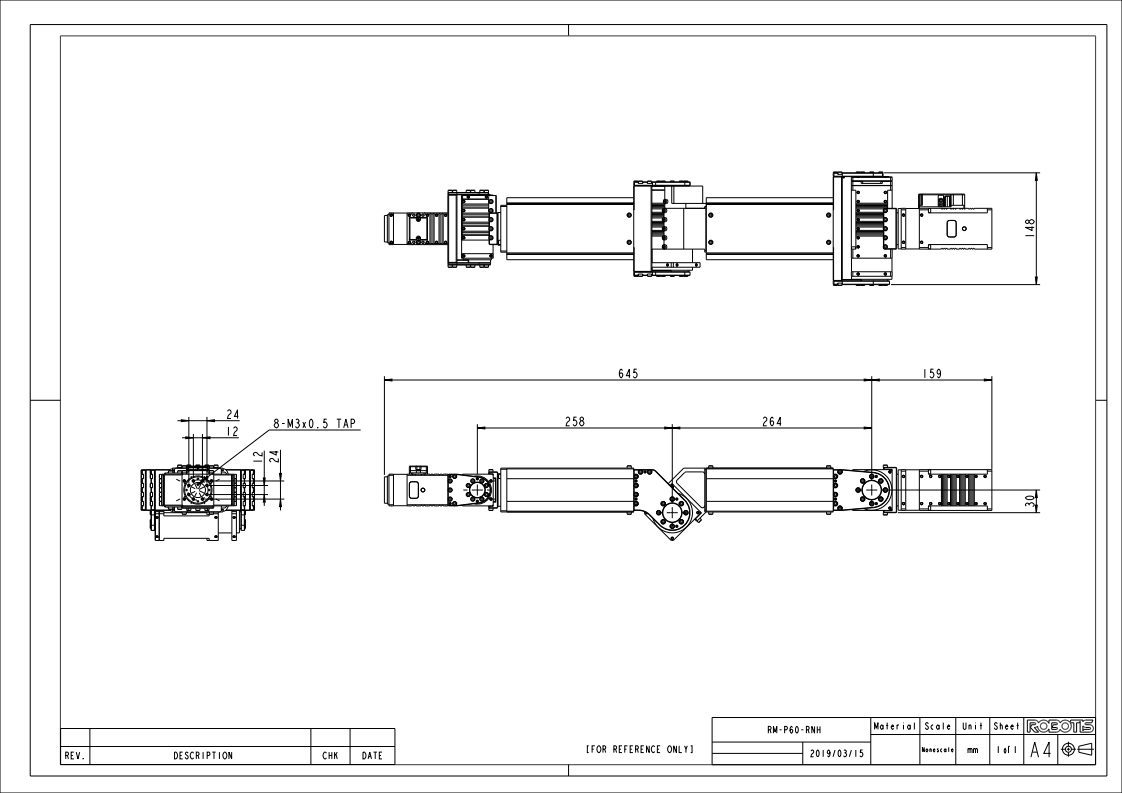
| Reach | 645 mm |
| Repeatability | ±0.05 mm |
| Weight | 5 kg |
| Operating voltage | 24 V |
| Resolution | Joint 1 : -π(rad) ~ π(rad) , -501,923 ~ 501,923 (pulse) Joint 2 : -π(rad) ~ π(rad) , -501,923 ~ 501,923 (pulse) Joint 3 : -π(rad) ~ π(rad) , -501,923 ~ 501,923 (pulse) Joint 4 : -π(rad) ~ π(rad) , -501,923 ~ 501,923 (pulse) Joint 5 : -π(rad) ~ π(rad) , -303,750 ~ 303,750 (pulse) Joint 6 : -π(rad) ~ π(rad) , -303,750 ~ 303,750 (pulse) |
| DYNAMIXEL Pro Model Name |
Joint 1, 2 : PH54-200-S500-R (200W) Joint 3, 4 : PH54-100-S500-R(100W) Joint 5, 6 : PH42-020-S300-R (20W) |
| Operating Range | Joint 1 : -π(rad) ~ π(rad) Joint 2 : -π/2(rad) ~ π/2(rad) Joint 3 : -π/2(rad) ~ 3π/4(rad) Joint 4 : -π(rad) ~ π(rad) Joint 5 : -π/2(rad) ~ π/2(rad) Joint 6 : -π(rad) ~ π(rad) |
| Default ID | Joint 1 (ID:1), Joint 2 (ID:2), Joint 3 (ID:3), Joint 4 (ID:4), Joint 5 (ID:5), Joint 6 (ID:6) |
| Motor type | Brushless DC Servo(H54P Series), Coreless DC Motor(H42P Series) |
| Position sensor type | Absolute Encoder(for Homing), Incremental Encoder(for Control) |
| Communications | RS485 |
| Communication Baudrate | 1000000 bps |
硬件尺寸
- 不带夹具
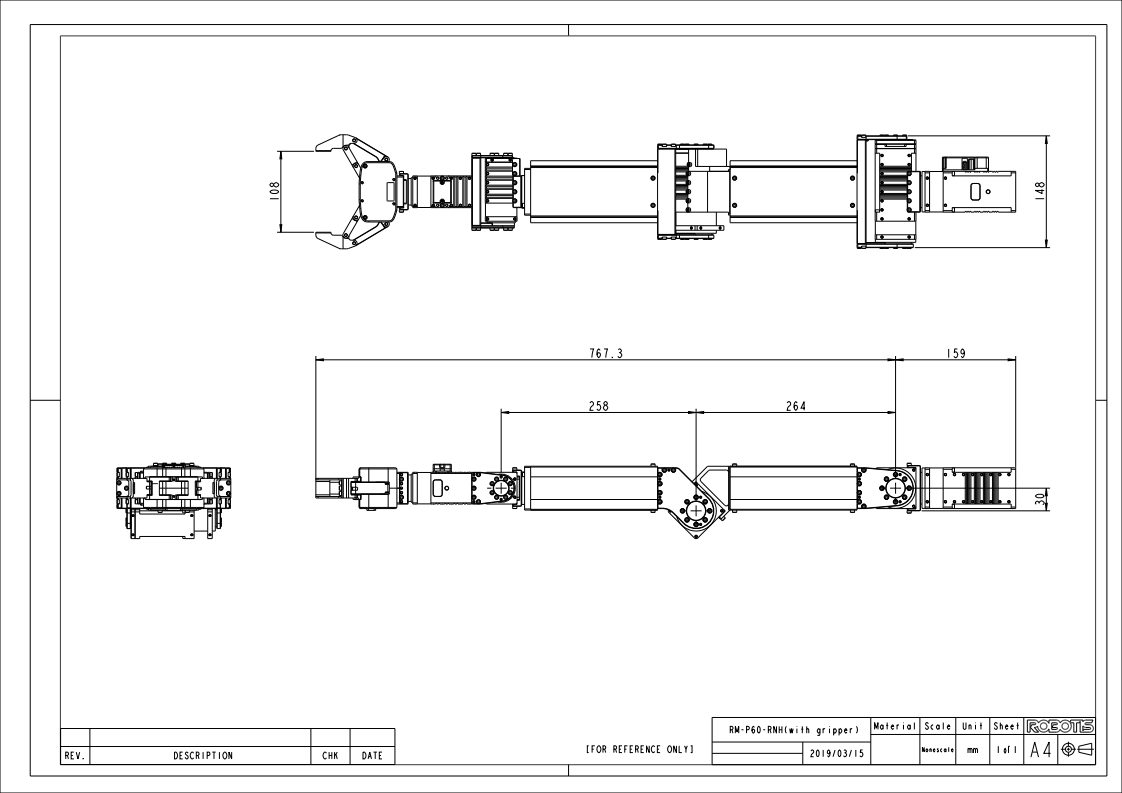
- 带夹具:
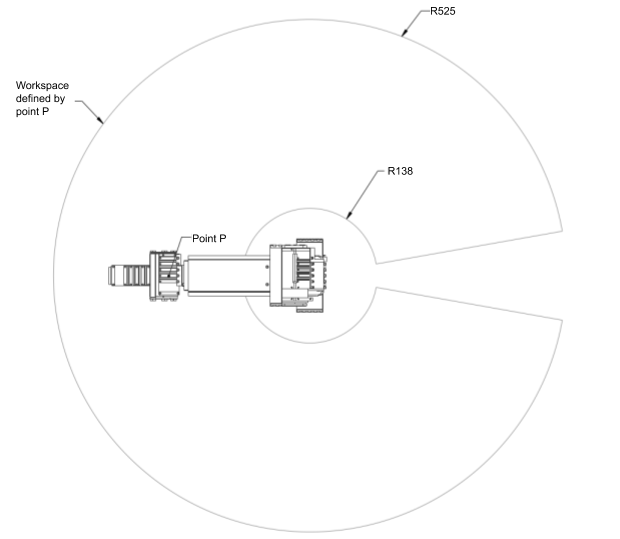
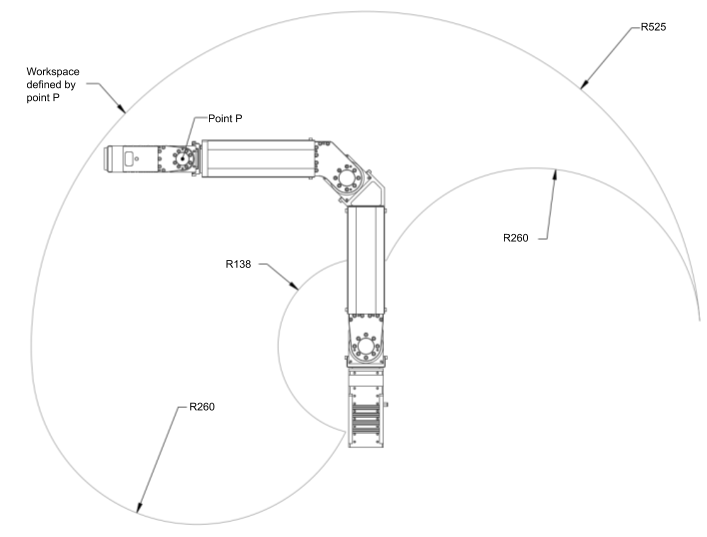
- 工作范围
- home位置
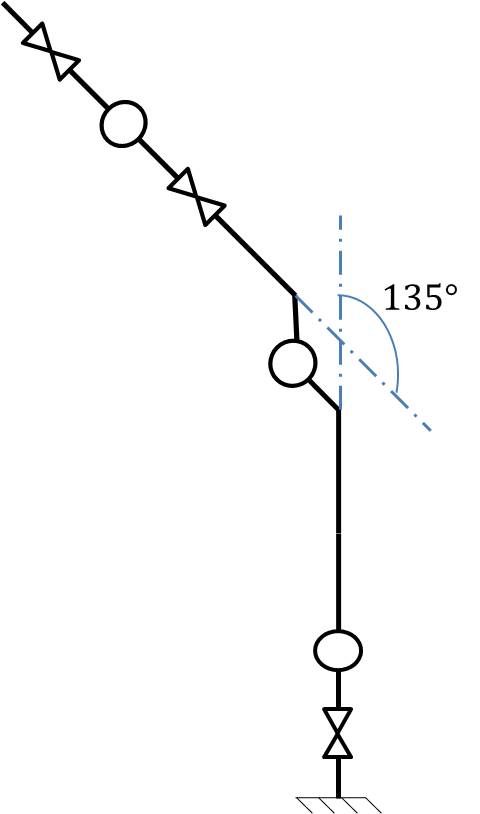
- DH 配置
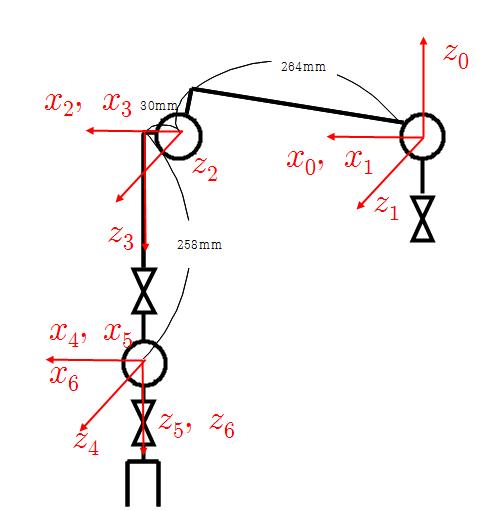
- DH 参数
| Link | Link Length(mm) | Link Twist(rad) | Joint Offset(mm) | Joint Angle(rad) | DXL Angle(rad) |
|---|---|---|---|---|---|
| 1 | 0 | -π/2 | 0 | 0 | 0 |
| 2 | 265.69 | 0 | 0 | 0 |  |
| 3 | 30 | -π/2 | 0 | 0 |  |
| 4 | 0 | -π/2 | 258 | 0 | 0 |
| 5 | 0 | -π/2 | 0 | 0 | 0 |
| 6 | 0 | 0 | 0 | 0 | 0 |
连线介绍
- 连线图
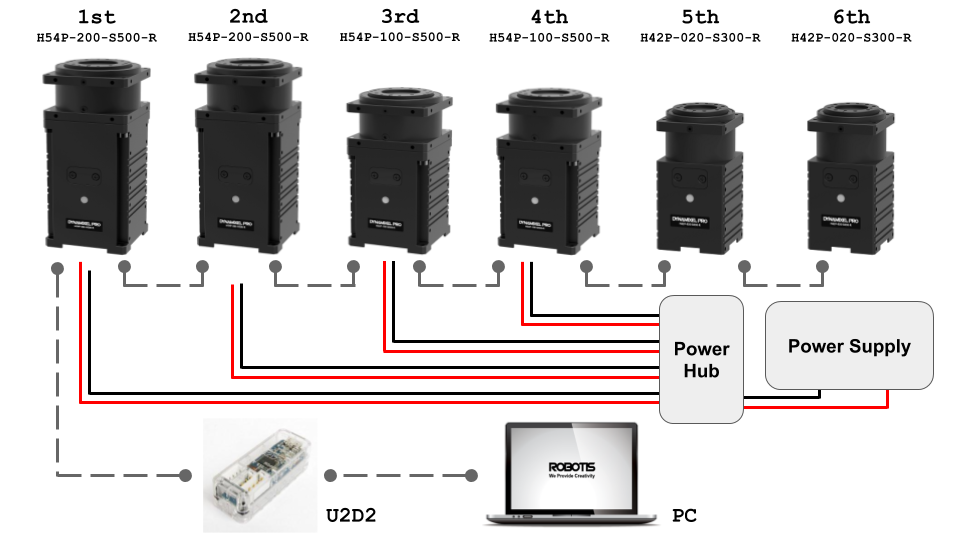
- 供电电压24V,电流15A以上
- 连接器
| Item | RS-485 | Power | External Port |
|---|---|---|---|
| Pinout | 1 GND2 VDD3 DATA+4 DATA- |
1 GND2 VDD |
1 GND2 VDD3 PORT 14 PORT 25 PORT 36 PORT 4 |
| Diagram |  |
 |
 |
| Housing |  JST EHR-4 |
 MOLEX 39-01-2020 |
 MOLEX 51021-0600 |
| PCB Header |  JST B4B-EH-A |
 MOLEX 39-28-1023 MOLEX 87427-0242 |
 MOLEX 53047-0610 |
| Crimp Terminal | JST SEH-001T | MOLEX 39-00-0038 | MOLEX 50079-8100 |
| Wire Gauge for DYNAMIXEL | 21 AWG | 20 AWG | 26 AWG |
U2D2介绍
- U2D2 是一款小型 USB 通信转换器,可以通过 PC 控制和操作舵机。 通过 USB 集线器将 U2D2 连接到 PC。

- 目标位置值决定舵机-P 的旋转位置。
| Model Name | Relationship between angle(deg) and position value |
|---|---|
| PH54-200-S500-R PH54-100-S500-R |
-180 ~ 180 (deg) → -501923 ~ 501923  |
| PH42-020-S300-R | -180 ~ 180 (deg) → -303750 ~ 303750  |
参考
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号