



















OpenManipulator-P机械臂入门教程-机械手RH-P12-RN说明
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
说明
- 介绍机械臂和机械手RH-P12-RN联合使用
部件
- 清单
| Part Name | Quantity | |
|---|---|---|
| Necessary Parts | OpenMANIPULATOR-P | 1 |
| RH-P12-RN (Gripper) | 1 | |
| Chassis Parts | FRP42_A110K | 1 |
| Cables | CABLE_4P_180MM | 1 |
| Miscellaneous | WB_M3X08_NYLOK_K | 12 |
- 硬件图

组装说明
- 使用八颗 WB_M3X08_NYLOK_K 螺丝将 FRP42_A110K 固定到 OpenMANIPULATOR-P 的尖端。
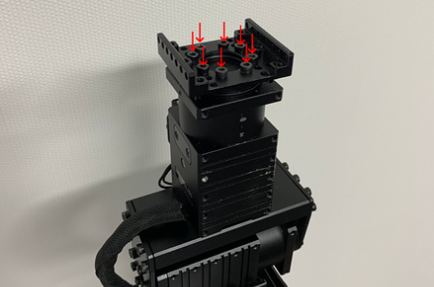
- 将 RH-P12-RN Gripper 组装到固定框架(FRP42_A110K)上并拧紧四颗 WB_M3X08_NYLOK_K 螺丝。

- 使用 CABLE_4P_180MM 电缆连接 OpenMANIPULATOR-P 和 RH-P12-RN。

运行说明
- 启动roscore
roscore- 启动机械臂
roslaunch open_manipulator_p_controller open_manipulator_p_controller.launch with_gripper:=true- 启动gui
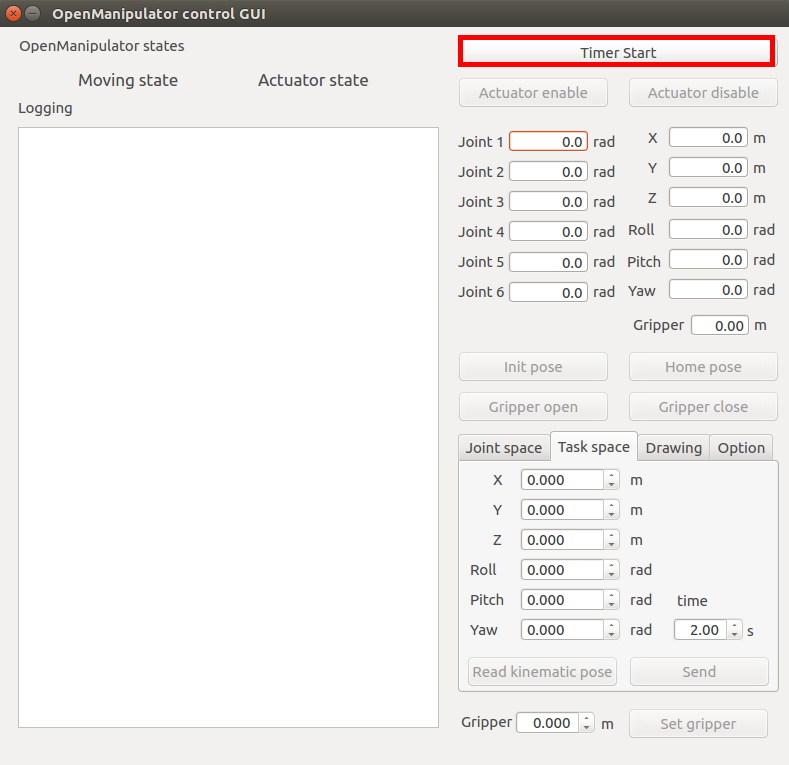
roslaunch open_manipulator_p_control_gui open_manipulator_p_control_gui.launch with_gripper:=true- 要使用 RH-P12-RN(夹持器)控制 OpenMANIPULATOR-P,请单击定时器启动按钮。
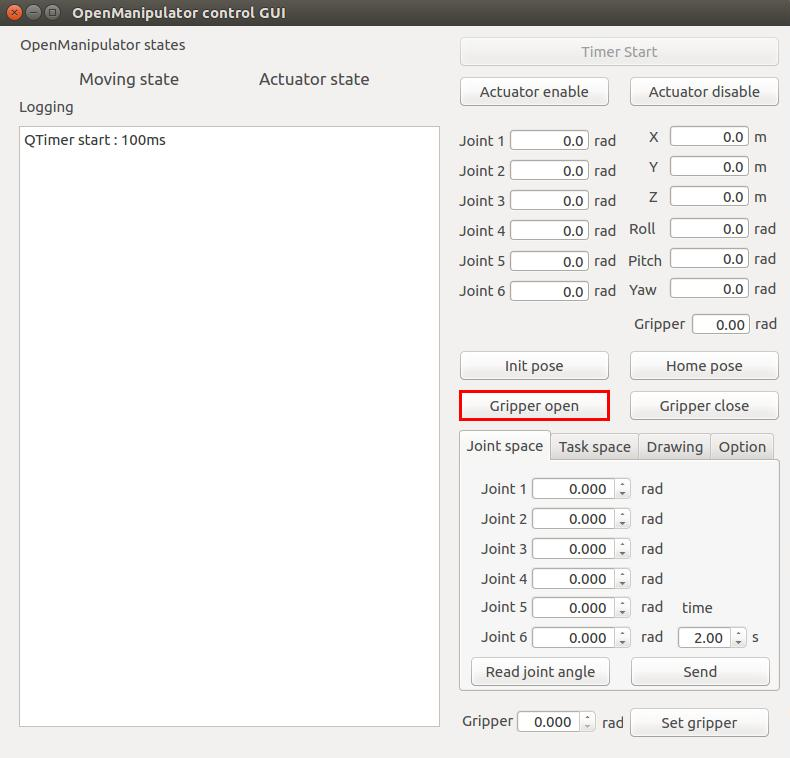
- 要激活 RH-P12-RN(夹持器),请单击夹持器打开按钮。
控制
- 键盘控制命令
roslaunch open_manipulator_p_teleop open_manipulator_p_teleop_keyboard.launch with_gripper:=true- 手柄控制命令
- PS4或Xbox 360
$ export ROS_NAMESPACE=open_manipulator_p
$ roslaunch teleop_twist_joy teleop.launch
$ roslaunch open_manipulator_p_teleop open_manipulator_p_teleop_joystick.launch with_gripper:=truemoveit控制
- 运行命令
roslaunch open_manipulator_p_controllers joint_trajectory_controller.launch sim:=false with_gripper:=true仿真
- 启动带机械手的仿真
roslaunch open_manipulator_p_gazebo open_manipulator_p_gazebo.launch with_gripper:=true- 启动机械臂带机械手的控制
roslaunch open_manipulator_p_controller open_manipulator_p_controller.launch use_platform:=false with_gripper:=true纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号