



















ROS2与Nav2应用opennav仿真教程-激光2D融合建图和导航
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
说明
- 介绍如何通过脚本来实现多点导航
步骤
- 启动仿真
ros2 launch honeybee_bringup robot.launch.py use_simulation:=true use_sim_time:=true- 效果图

- 启动建图和导航
ros2 launch honeybee_nav2 nav2.launch.py localization_type:=2D slam:=True use_sim_time:=true- 启动rviz
ros2 launch honeybee_nav2 rviz_2d_navigation.launch.py- 效果图
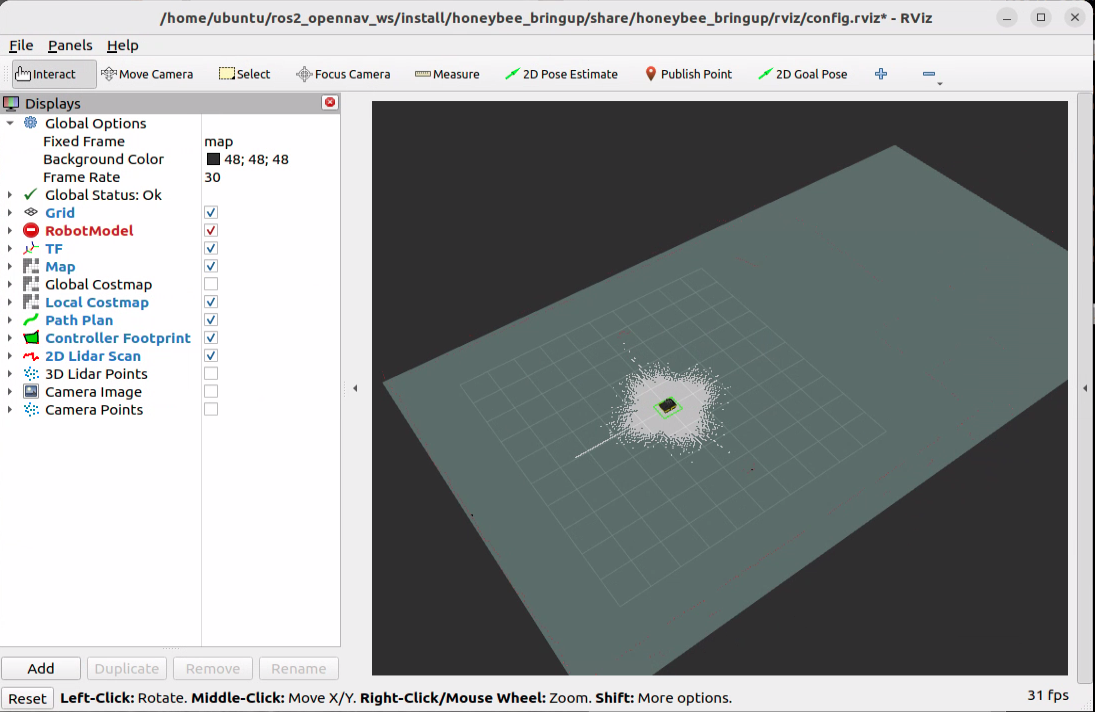
-
点击rviz上的2D Goal Pose来按钮,在rviz地图的任意位置选择为目标点并拉出一个方向,机器人即可自动导航到目标点。
-
效果图

- 保存地图
/home/ubuntu/ros2_opennav_ws/src/nav2_opennav/opennav_amd_demonstrations/scripts/save_map-
地图保存在$HOME/experiment_files,按时间命令入如:map_1725188425.pgm map_1725188425.yaml
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号