



















ROS2与Turtlebot3-ARM入门教程-硬件介绍及组装
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流

文章说明
- 本教程主要介绍Turtlebot3-ARM的硬件组成和组装方法
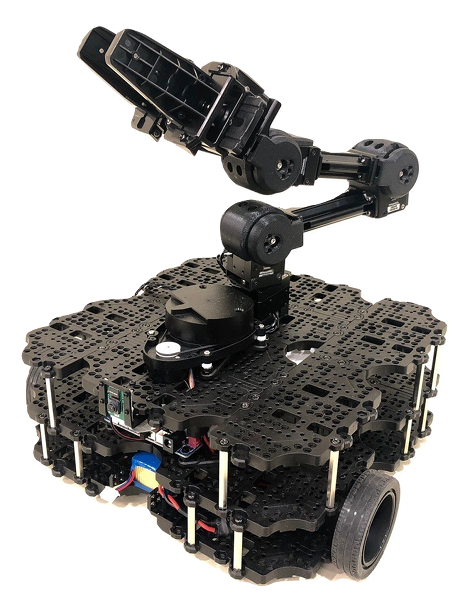
硬件介绍
![]()
-
ROBOTIS的OpenMANIPULATOR是一款支持ROS的机械臂 -
OpenMANIPULATOR的优点是与TurtleBot3 Waffle和Waffle Pi兼容 -
这样可以弥补其自由度的不足,并可以作为具有TurtleBot3拥有的SLAM和导航功能的服务机器人而具有更高的完整性
-
更多
OpenMANIPULATOR的资料请关注本站的OpenMANIPULATOR专栏
组装
-
安装时先拆下激光雷达并将其移到前面(红色圆圈代表螺丝位置)
-
其次,将
OpenMANIPULATOR附加到TurtleBot3上(黄色圆圈代表螺栓的位置)


纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
欢迎加入我们的turtlebot3交流群,微信扫描右侧二维码立即进群交流