



















walking机器人入门教程-rviz插件-多点导航插件升级版使用

文章说明
- 多点导航插件升级版是原walking-rviz-plugin插件的改进版
- 对于nav2_waypoint_follower包做了改进增加对航点操作的支持
- 对于rviz插件本身航点管理做了升级,支持航点操作支持
航点文件制作
1. 启动机器人进入建图和导航状态
- 通过手机或笔记本, 浏览器打开网址:http://walking机器人ip:5050/admin
- 点击管理端->服务配置.分别启动底盘,雷达,全新建图,导航
- 每次点击间隔3秒左右,特别是全新建图和导航之间,可以5秒间隔。
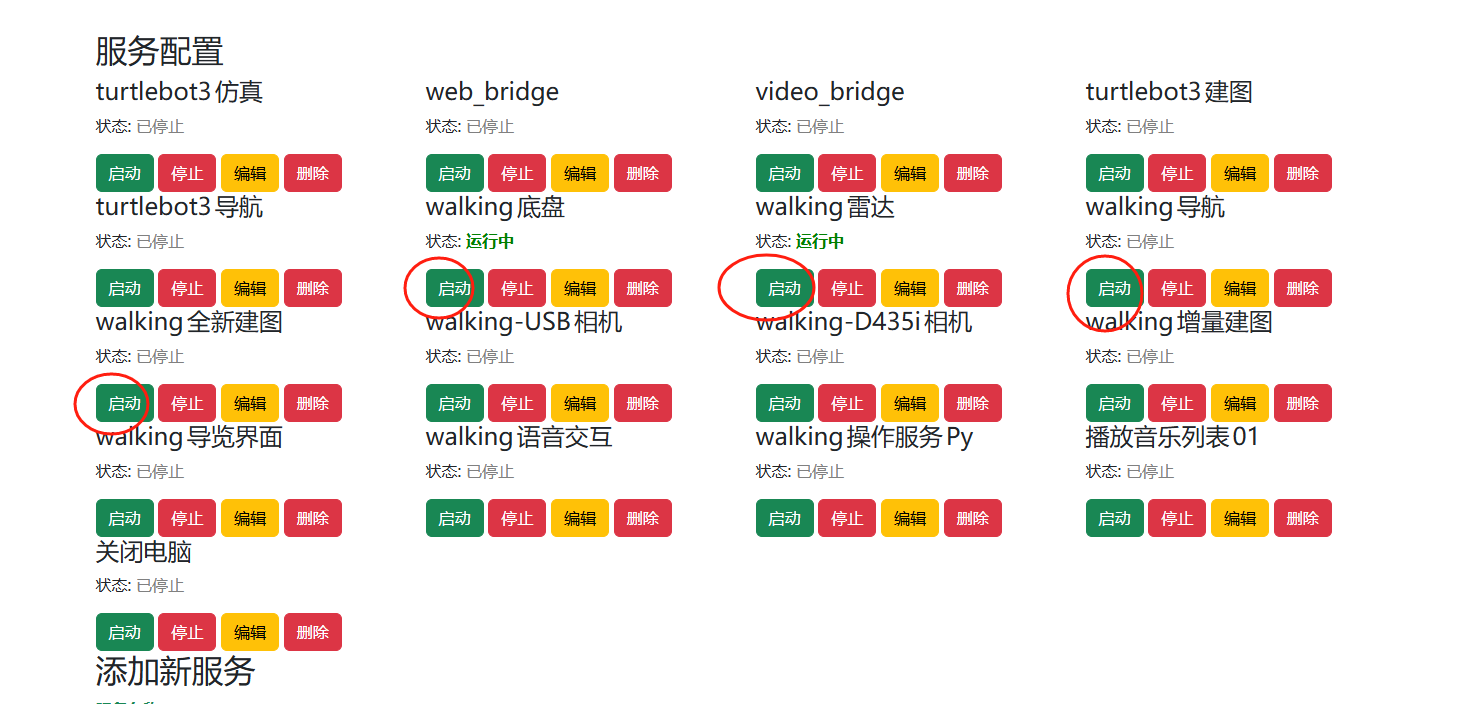
- 启动后,会再机器人屏幕上显示启动的窗口。
2. 在远程PC上通过nomachine连接到机器人桌面
3. 有两个打开的rviz界面,一个用于进行建图和保存地图,一个用于导航
-
建图rviz效果图:

-
导航rviz效果图:

4. 在导航rviz的地图上随意指定目标,一步步先把地图建出来

5. 设置多点导航
-
点击左边walkingNavigation -> waypoint/Nav through pose mode进入多点模式
-
效果图

-
点击右边地图上选择walkingTool,再在地图上设定目标点。同时左边也会出现设置的坐标点列表
-
效果图

-
设置好坐标点后,就可以保存航点文件
-
点击save waypoint即可,选择目录和输入文件名,默认我们保存~/waypoints/下
-
命名类似为office_new.json,要写上后缀名

-
保存好的航点文件,就可以给高级教程里面的航点坐标配置使用了。参考文章
多点导航添加操作
1. 设置操作和参数
-
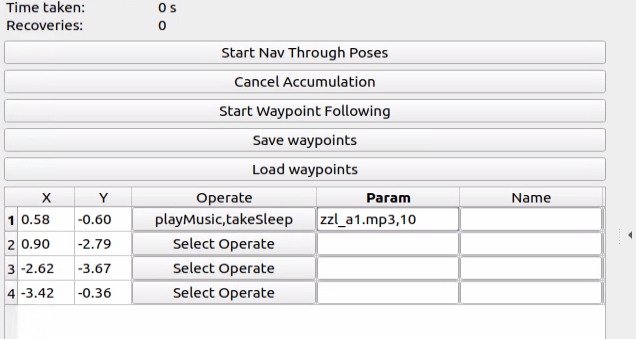
保存航点文件之后,继续设置航点的操作,比如播放Music目录下的音乐,播放后停留10秒再继续下一个目标点
-
假设Music下有音乐名称为zzl_a1.mp3
-
选择操作

-
并输入相应的参数,效果图
-
我们设置第一个点,到达目的点后,播放音乐,播放完休眠10秒再执行第二个坐标点。
-
其他默认,不设置其他操作
-
再点击start waypoint following即可开始多点导航。
-
我们这里暂时不开始导航,要先启动操作服务。要不到达目标点的操作不生效
2. 开启操作服务
- 通过手机或笔记本, 浏览器打开网址:http://walking机器人ip:5050/admin
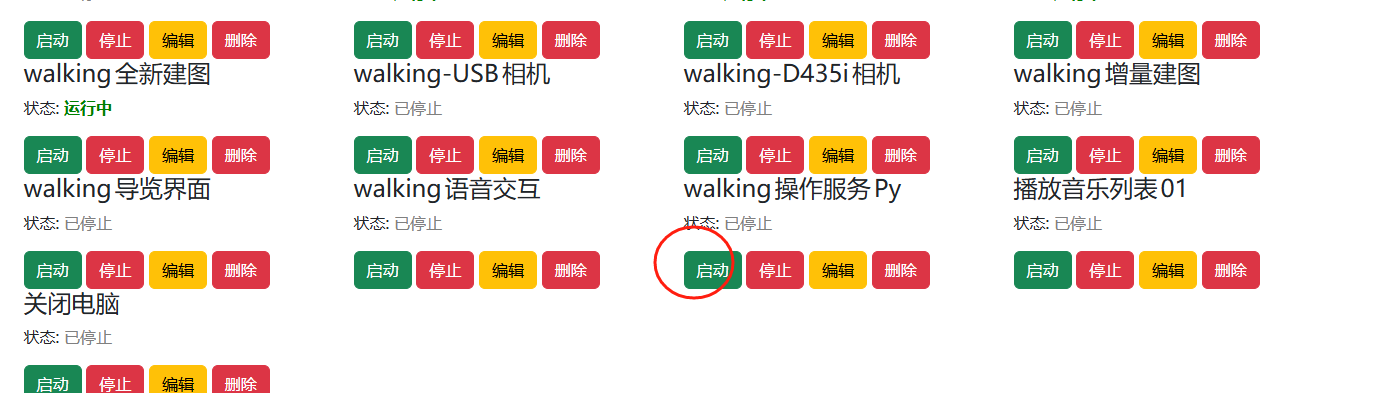
- 点击管理端->服务配置.启动操作服务
- 效果图:
3. 开始导航
- 点击左边start waypoint following进行多点导航
- 开始后机器人沿着航点进行导航,当到达第一个航点,会播放相应的音乐,播放完暂停10秒,然后开始后面的航点。
保存序列化地图
1.在建图rviz界面上,在Serialize Map输入/home/ubuntu/map/map_office_new
- 默认我们地图放置在/home/ubuntu/map/目录下,以map_xxxx命名。
- 效果图

2.再点击Serialize Map按钮,即可保存序列化地图
-
在目录下/home/ubuntu/map/增加2个文件,map_office_new.yaml和map_office_new.posegraph
-
保存地图后,我们就可以通过地图配置来指定使用,参考教程
-
有了这个序列化地图,我们就可以在后面使用增量建图,会自动加载这个建好的地图。