



















walking机器人高级教程-管理端-地图配置

文章说明
- 地图配置是为了方便切换不同的已经保存的序列化地图
- 默认地图保持在~/map/目录下,通过不同的名称来区别。
- 此地图通过slam-toolbox的rviz插件来保存序列化地图,具体参考教程
相关设备:
- walking机器人套件:采购地址
地图配置
- 通过手机或笔记本, 浏览器打开网址:http://walking机器人ip:5050/admin
- 界面效果
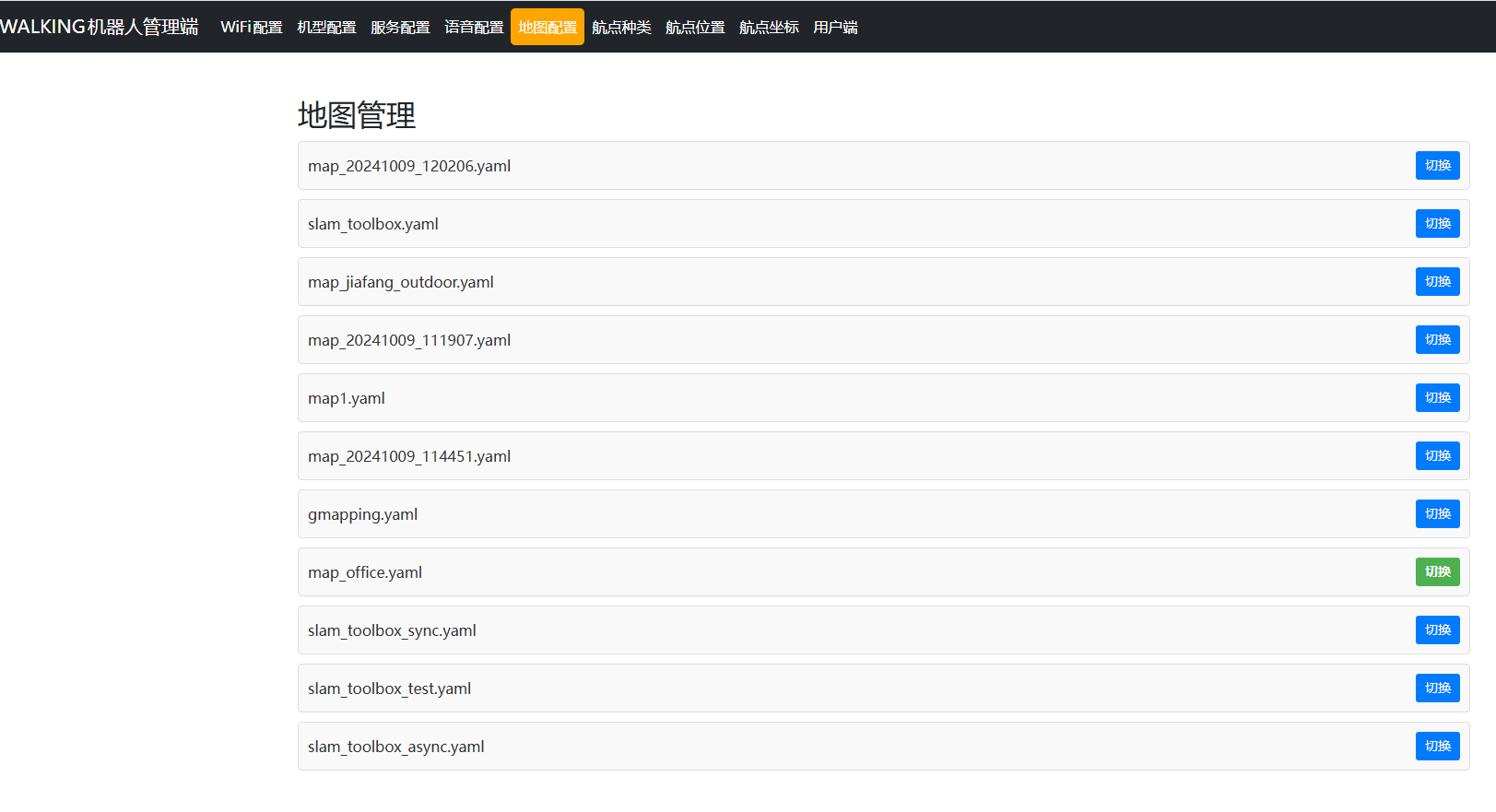
-
通过点击切换按钮即可更改地图,默认地图为map.yaml, map.posegraph
-
点击切换后,会通过建立软连接指向选择的地图
-
已经选择的地图,浅绿色显示。