



















walking机器人高级教程-WEBAPI的管理端介绍

文章说明
- walking机器人WEBAPI是为了提供便捷性配置和控制的web接口。同时也为手机APP和客户端提供后端接口。
管理端功能
- 功能清单
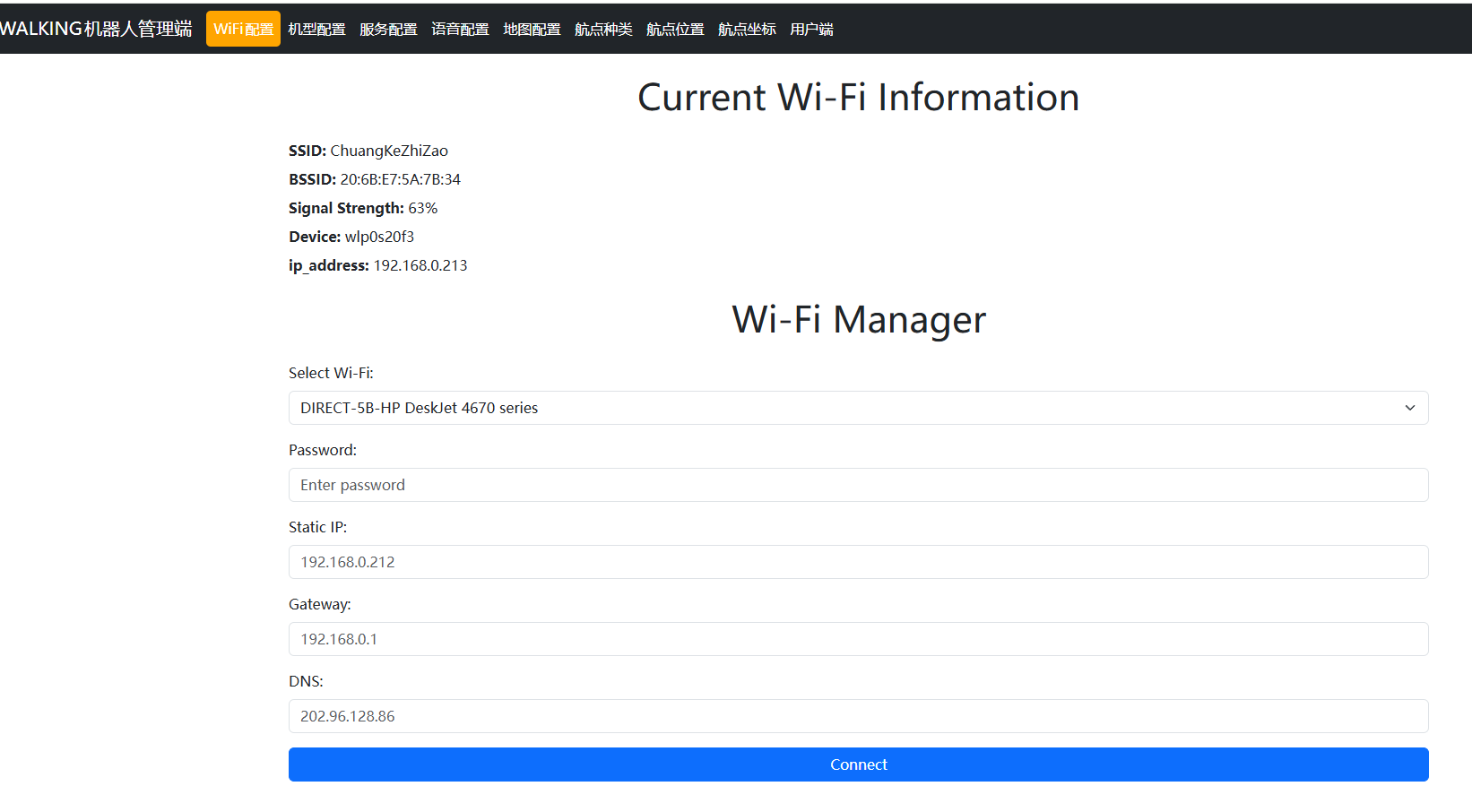
WiFi配置 - 提供为机器人配置wifi接口
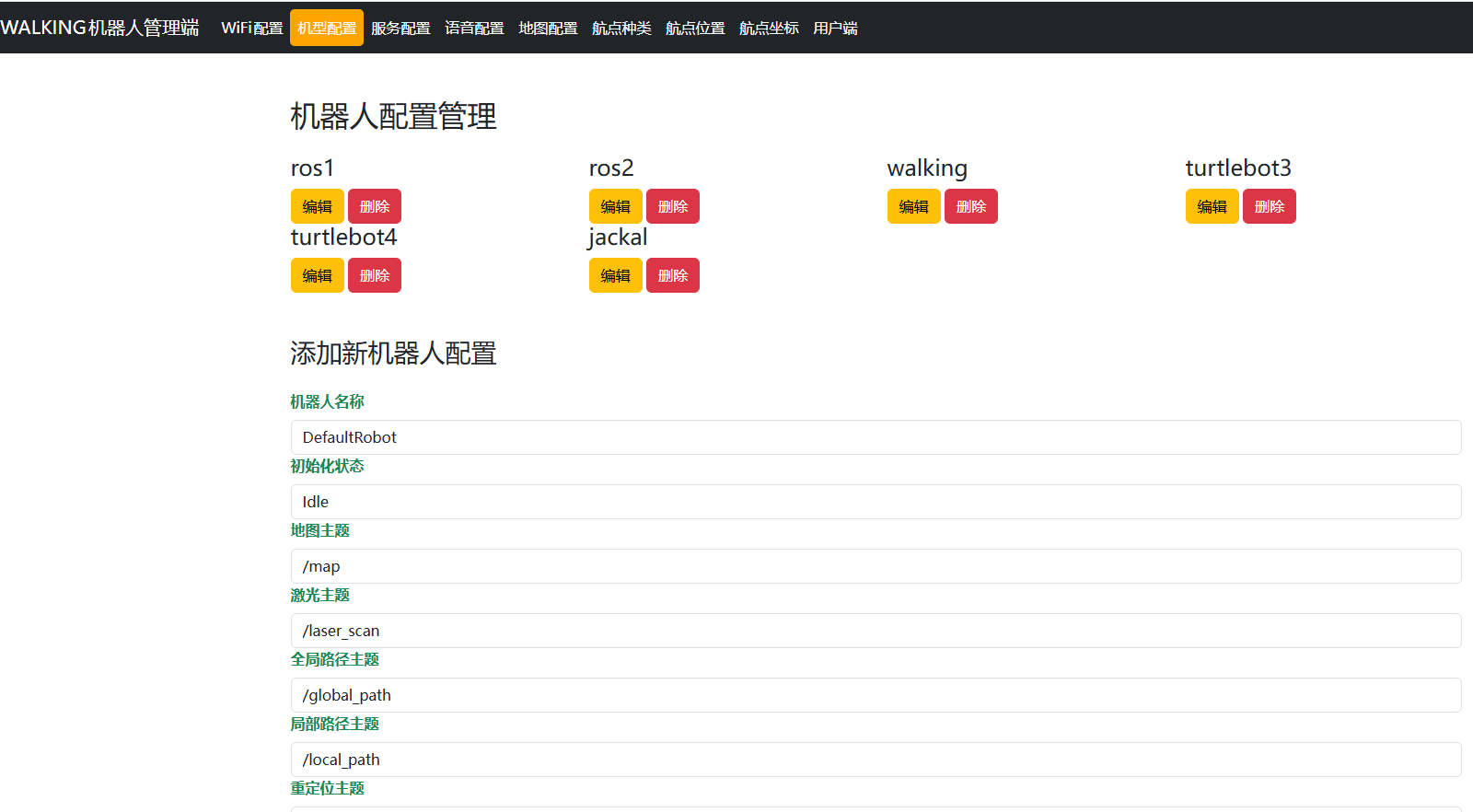
机型配置 - 提供不同机型选择,默认就是walking
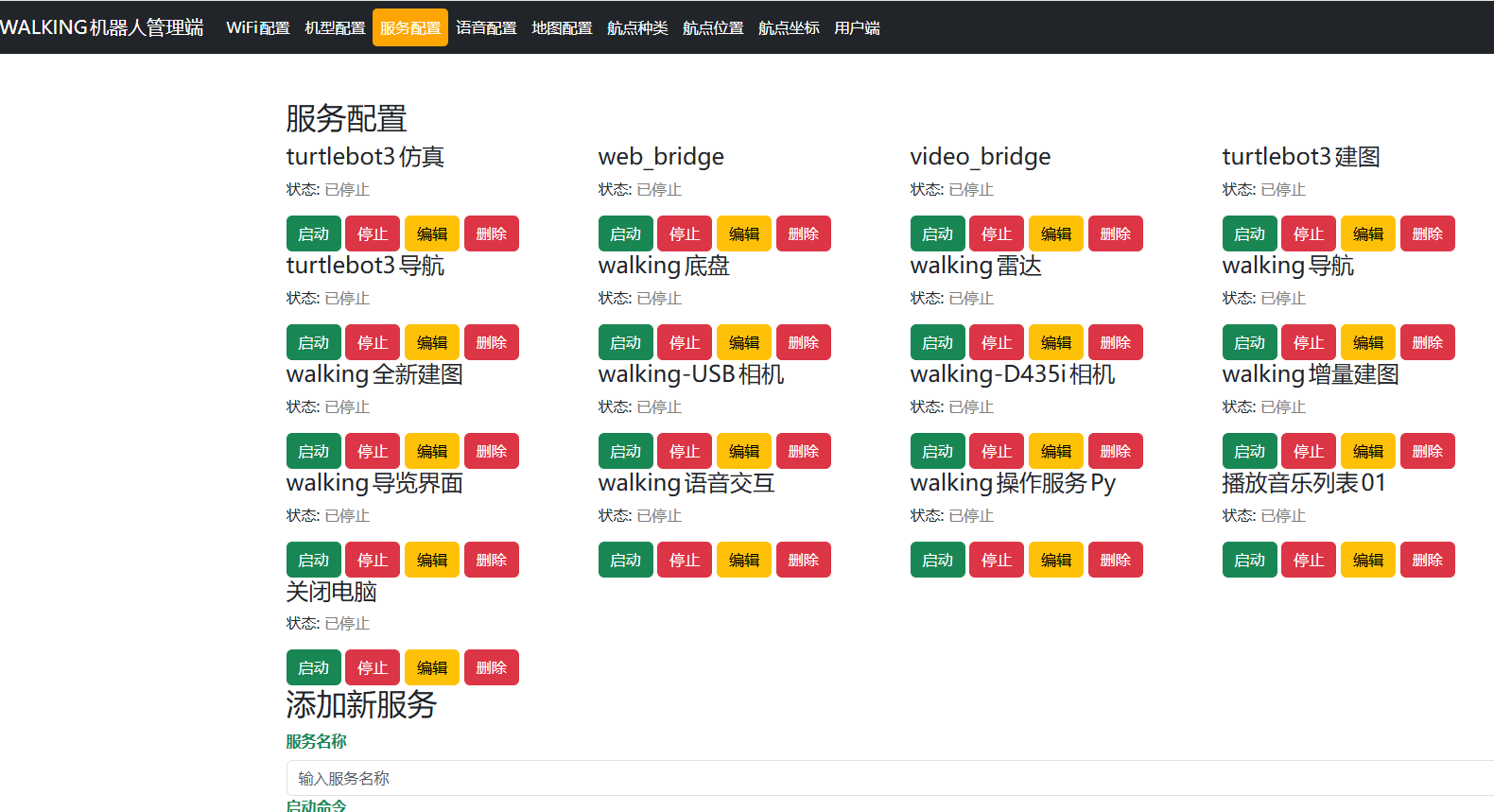
服务配置 - 提供开启和停止不同服务,默认有针对walking的服务,可以自己添加
语音配置 - 提供文字转语音
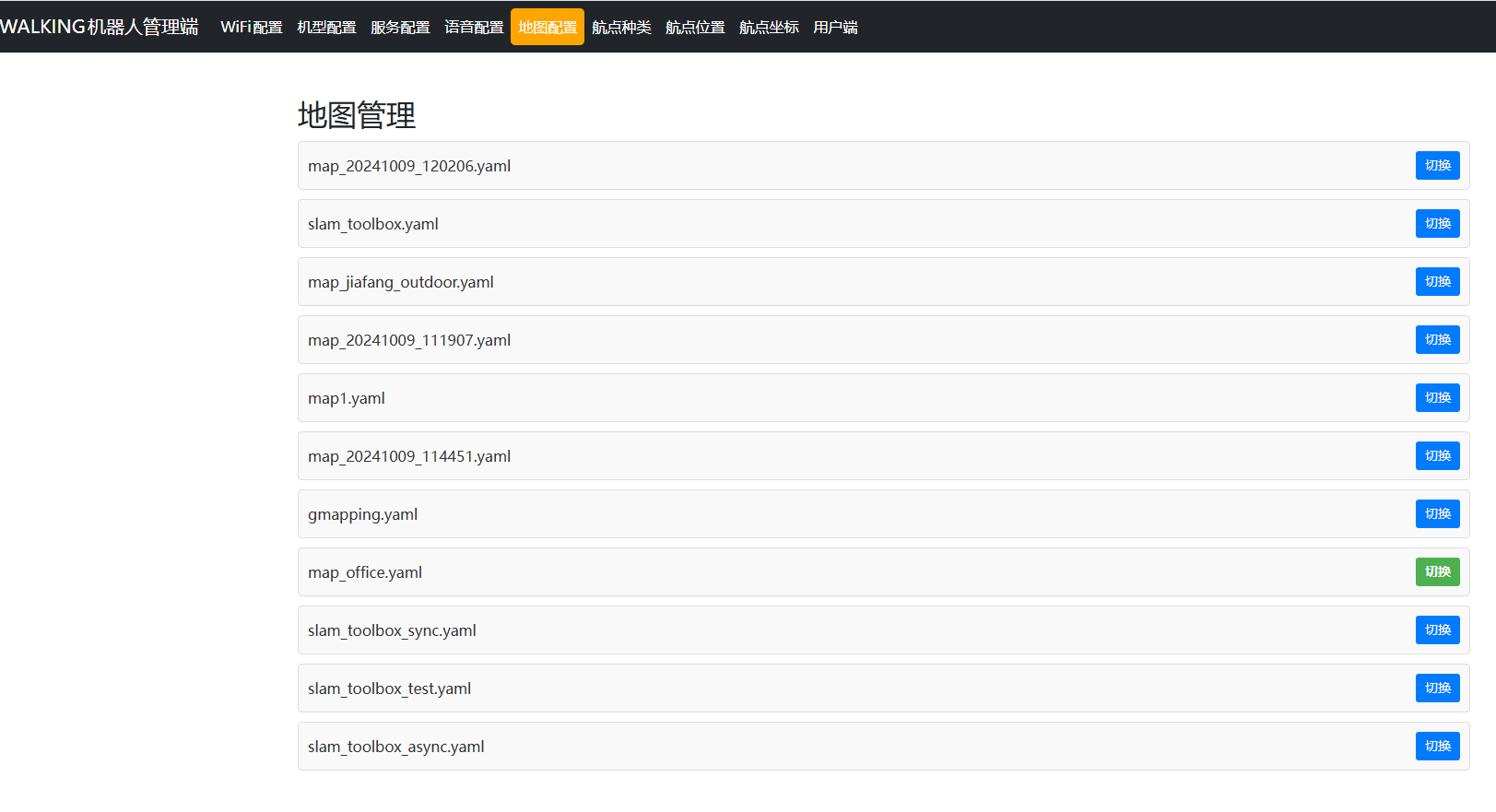
地图配置 - 提供不同地图的切换,用于导航。
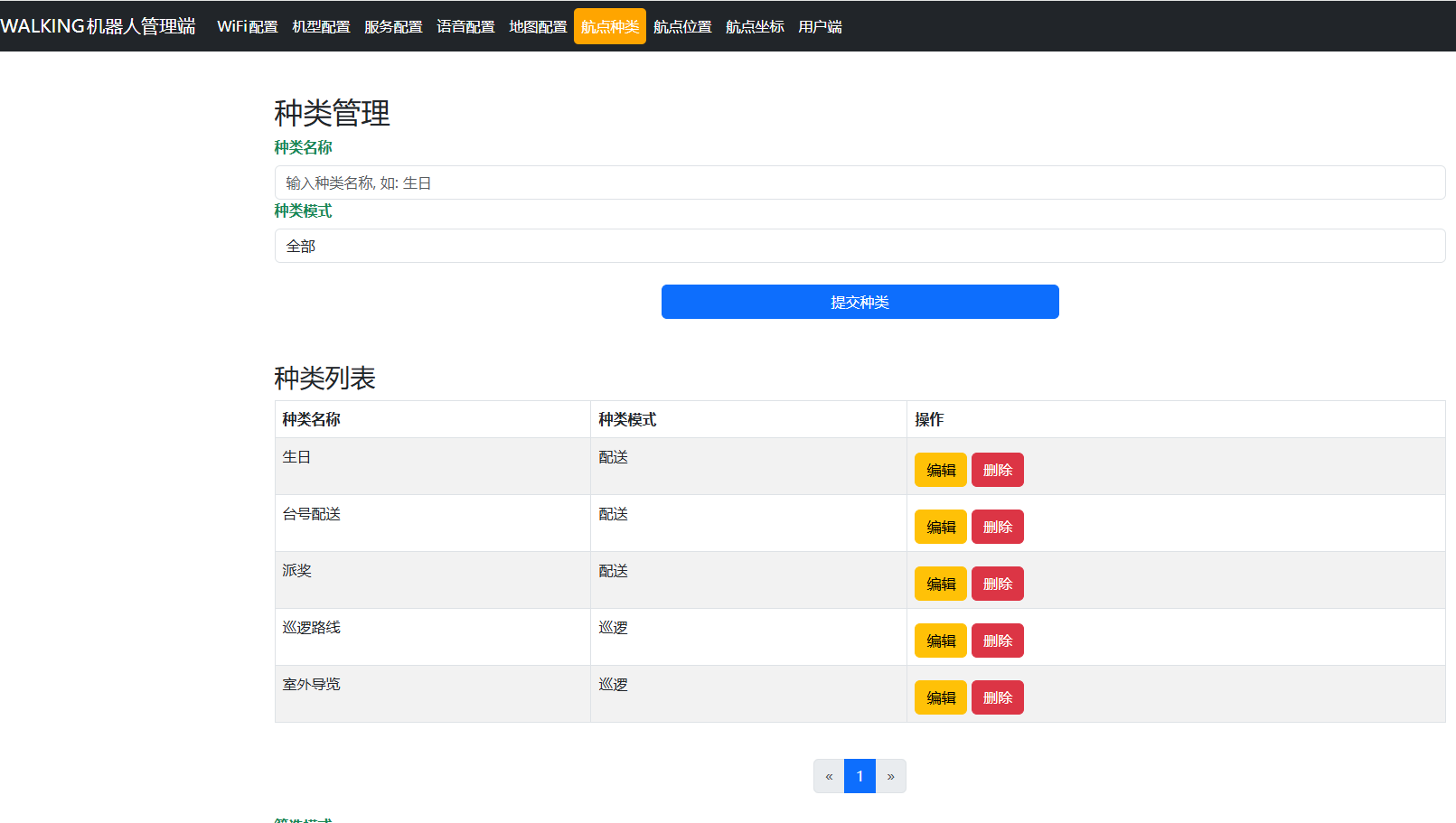
航点种类 - 提供航点分类,默认分类是配送或巡逻类别,针对不同的导航需求
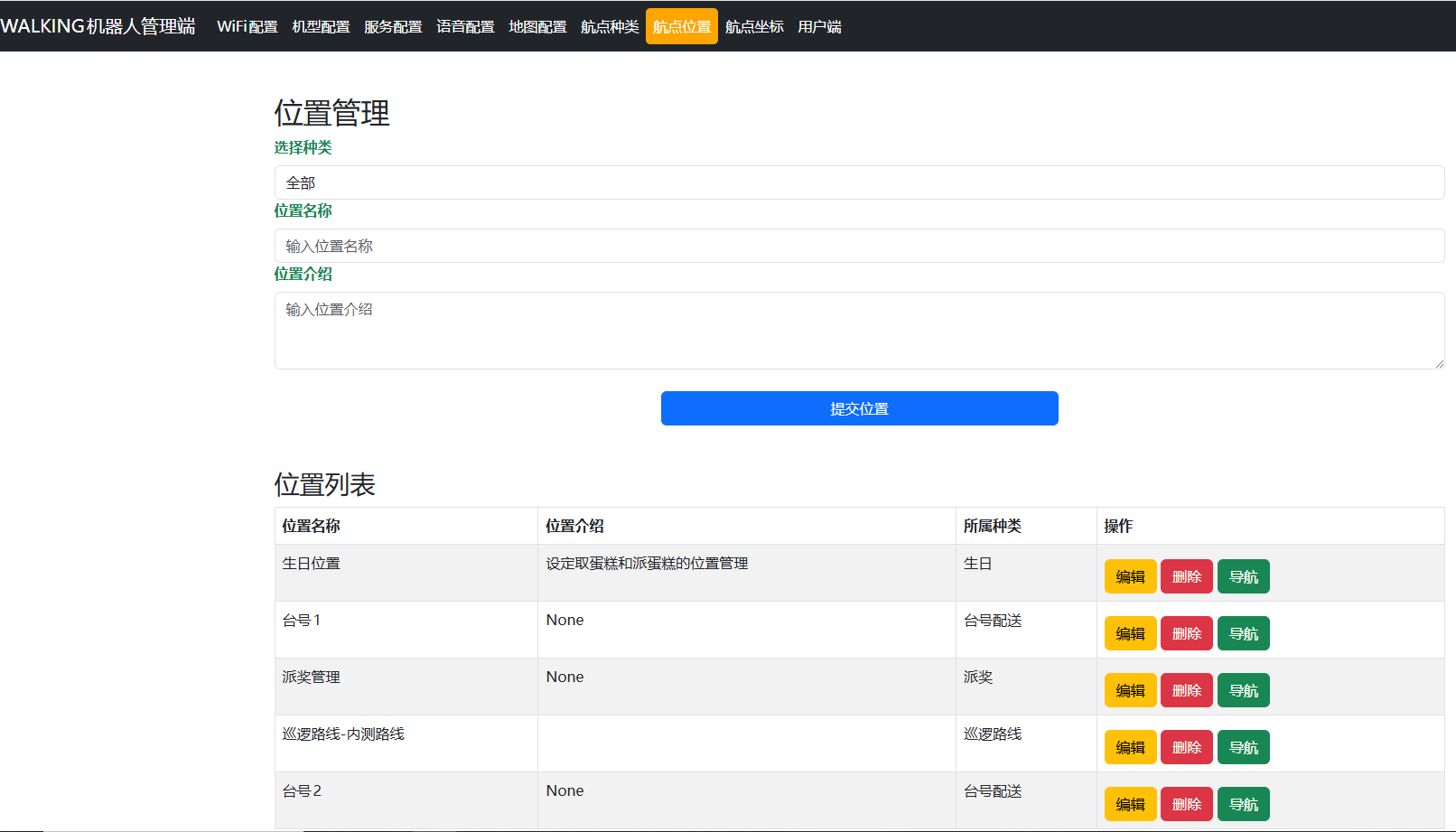
航点位置 - 提供航点位置,默认是台号和巡逻,针对不同位置的配送或巡逻需求
航点坐标 - 提供匹配航点位置的坐标,基于航点制作时候保持的航点文件。关联航点位置和具体的航点坐标。
用户端 - 跳转用户端界面效果
- WiFi配置
- 机型配置
- 服务配置
- 语音配置

- 地图配置
- 航点种类
- 航点位置
- 航点坐标
