



















walking机器人高级教程-管理端-服务配置

文章说明
- 服务配置是为了方便把各种要执行的命令转为页面按钮,方便启动和停止。
- 这些命令一般是启动后会一直执行的,也可以一次执行自动退出的程序。
相关设备:
- walking机器人套件:采购地址
服务配置
- 通过手机或笔记本, 浏览器打开网址:http://walking机器人ip:5050/admin
- 界面效果
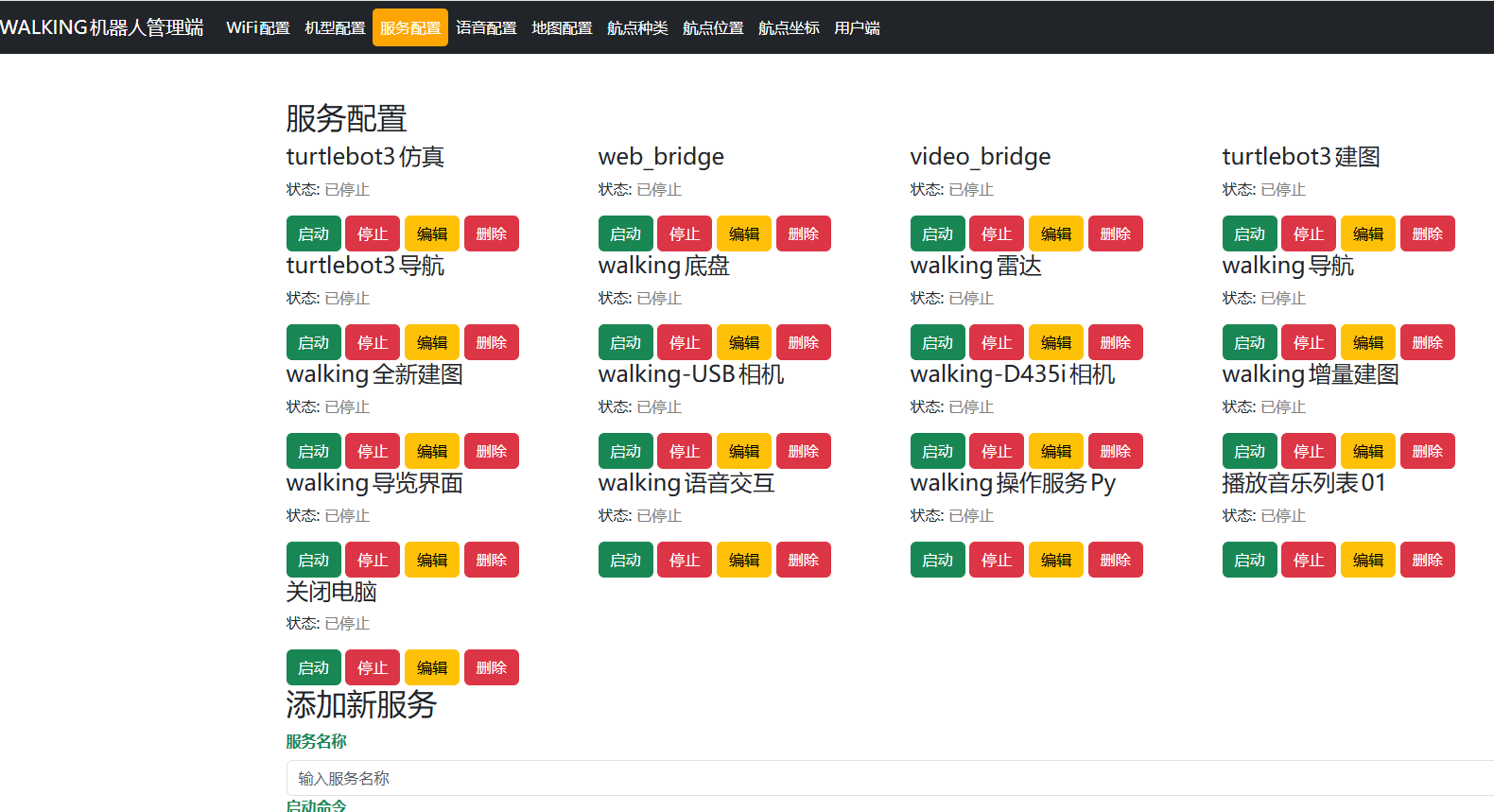
- 现有服务
turtlebot3仿真 - 用于启动turtlebot3仿真场景
web_bridge - 用于启动ROS2桥接,通过websock访问
video_bridge - 用于启动图像的桥接,通过websock访问
turtlebot3建图 - 用于启动turtlebot3建图
turtlebot3导航 - 用于启动turtlebot3导航
walking底盘 - 用于启动walking机器人底盘
walking雷达 - 用于启动rplidar的雷达
walking导航 - 用于启动walking机器人导航程序
walking全新建图 - 用于启动slam-toolbox建图算法,第一次的全新建图,并保持序列化地图。
walking-USB相机 - 用于启动USB的摄像头
walking-D435i相机 - 用于启动D435i深度相机
walking增量建图 - 用于启动slam-toolbox建图算法,基于现有序列化地图的增量建图
walking导览界面 - 用于启动QT简版控制界面
walking语音交互 - 用于启动语音交互
walking操作服务Py - 用于启动操作服务,与导航结合使用,到达目标点后执行不同的操作。
播放音乐列表01 - 用于播放固定的音乐列表
关闭电脑 - 关闭walking机器人,关闭后要关闭电源。- 服务参数
服务名称 - 输入服务名称,方便知道对应的命令内容
启动命令 - 输入启动命令,具体要执行的命令
停止条件 - 输入停止条件 (用分号分隔),关闭符合条件的进程,一般取执行命令的关键部分,如果命令启动多个程序,可以指定具体启动程序名称,可以指定多个,分号间隔即可。
清除命令 - 输入清除命令,用于停止后继续执行额外的命令,比如雷达关闭,没法停止旋转,可以执行一个停止旋转命令- 示例1
服务名称 - walking操作服务Py
启动命令 - ros2 run walking_operate operate_action_server.py
停止条件 - operate_action_server.py
清除命令 -- 示例2
服务名称 - 播放音乐列表01
启动命令 - cvlc ~/Music/playlist01.m3u
停止条件 - playlist01.m3u
清除命令 --
可以通过编辑现有服务,查看具体的内容