



















walking机器人高级教程-管理端-航点位置

文章说明
- 航点位置是区分航点种类下不同的位置点
- 比如航点种类为某个商场,航点位置就是某个商铺
相关设备:
- walking机器人套件:采购地址
航点位置
- 通过手机或笔记本, 浏览器打开网址:http://walking机器人ip:5050/admin
- 界面效果
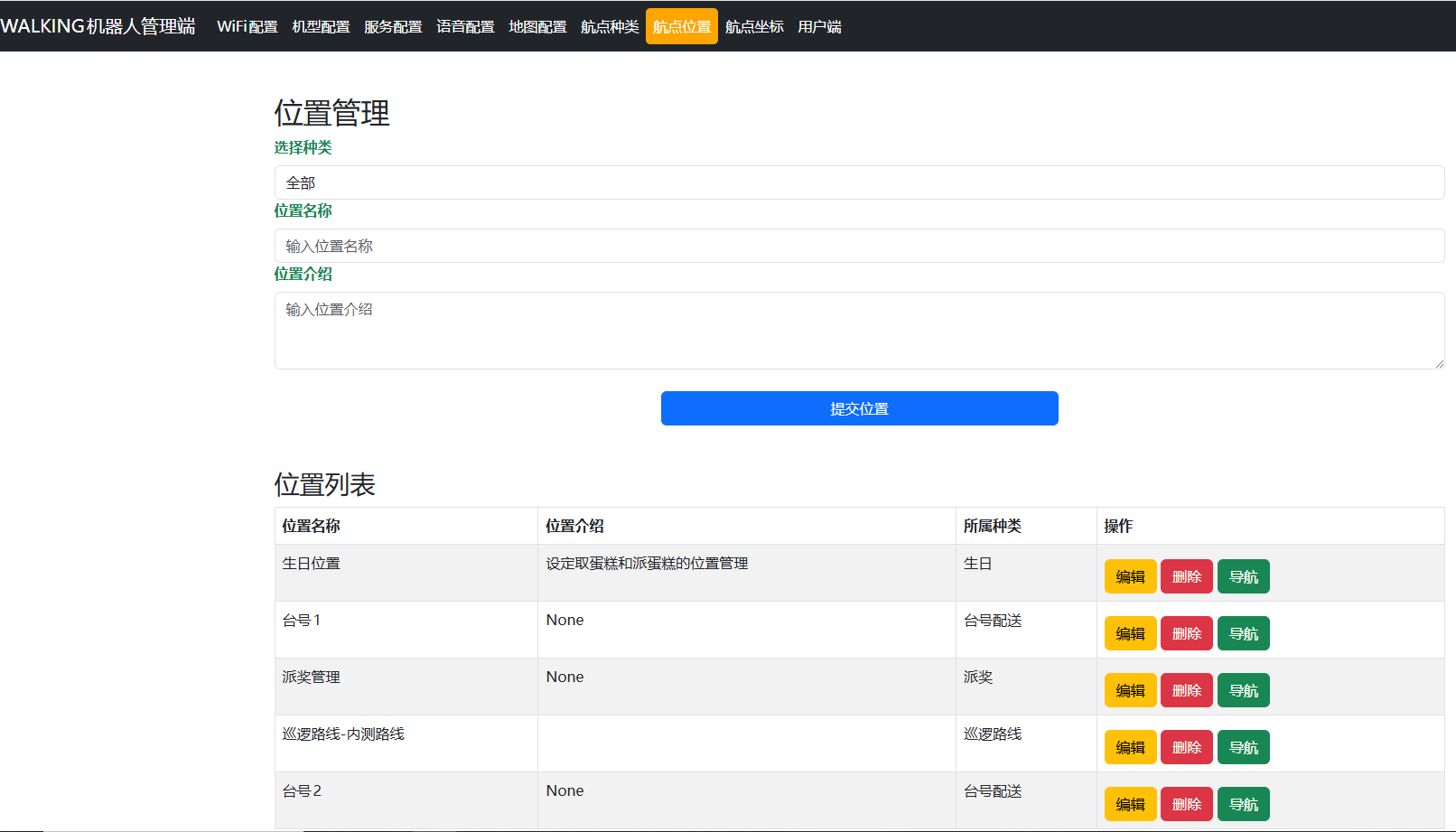
- 参数说明
选择种类 - 航点种类,选择其一。
位置名称 - 输入位置名称,标记不同位置
位置介绍 - 输入位置介绍,用于对具体位置介绍- 示例1
选择种类 - 台号配送
位置名称 - 台号1,设置名称为台号1
位置介绍 - 介绍台号1相关信息- 示例2
选择种类 - 巡逻路线
位置名称 - 巡逻路线-内测路线
位置介绍 - 介绍内测路线的航点相关信息