



















walking机器人高级教程-用户端-巡逻模式

文章说明
- 巡逻模式是读取航点种类里面的巡逻路线的所有路线,按列表方式呈现,点击展开可以看到每个路线的所有航点信息
相关设备:
- walking机器人套件:采购地址
巡逻模式
- 打开页面,http://walking机器人ip:5050/mloop
- 界面效果

使用流程
1. 机器人必须放置在初始建图的位置,方向和位置要一致。
- 最好是建图时候,做好标记。每次放置同一位置和方向。
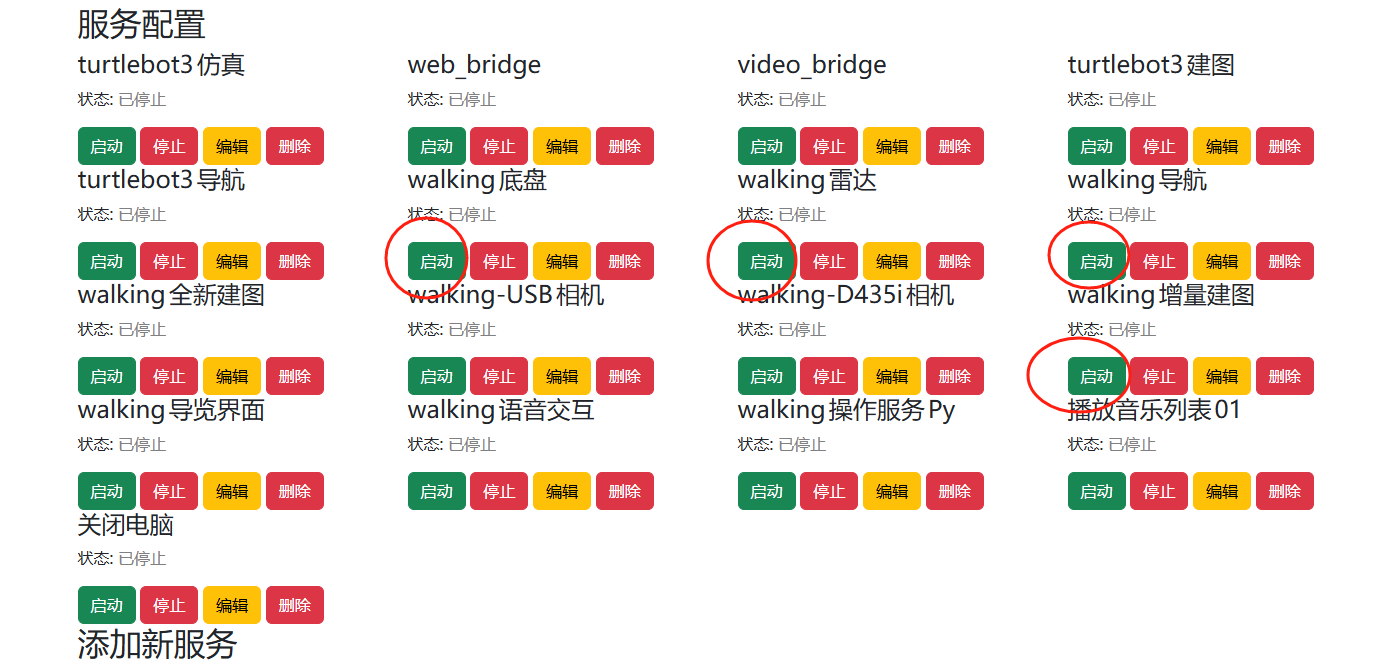
2. 手机或笔记本,打开页面http://walking机器人ip:5050/admin
- 选择管理端 - > 服务配置,依次点击:启动底盘,雷达,增量建图和导航。
- 每次点击间隔3秒左右,特别是增量建图和导航之间,可以5秒间隔。
3. 手机或笔记本,打开页面http://walking机器人ip:5050/mloop
- 选择路线,展开,点击游览此路线。机器人即自动开始进行导航。

-
如果坐标点关联了操作,当到达每个坐标点会自动执行相应操作