



















walking机器人高级教程-管理端-机型配置

文章说明
- 机型配置是为了ROS2桥接使用不同机器人参数,只要是给手机端使用
相关设备:
- walking机器人套件:采购地址
机型配置
- 通过手机或笔记本, 浏览器打开网址:http://walking机器人ip:5050/admin
- 界面效果
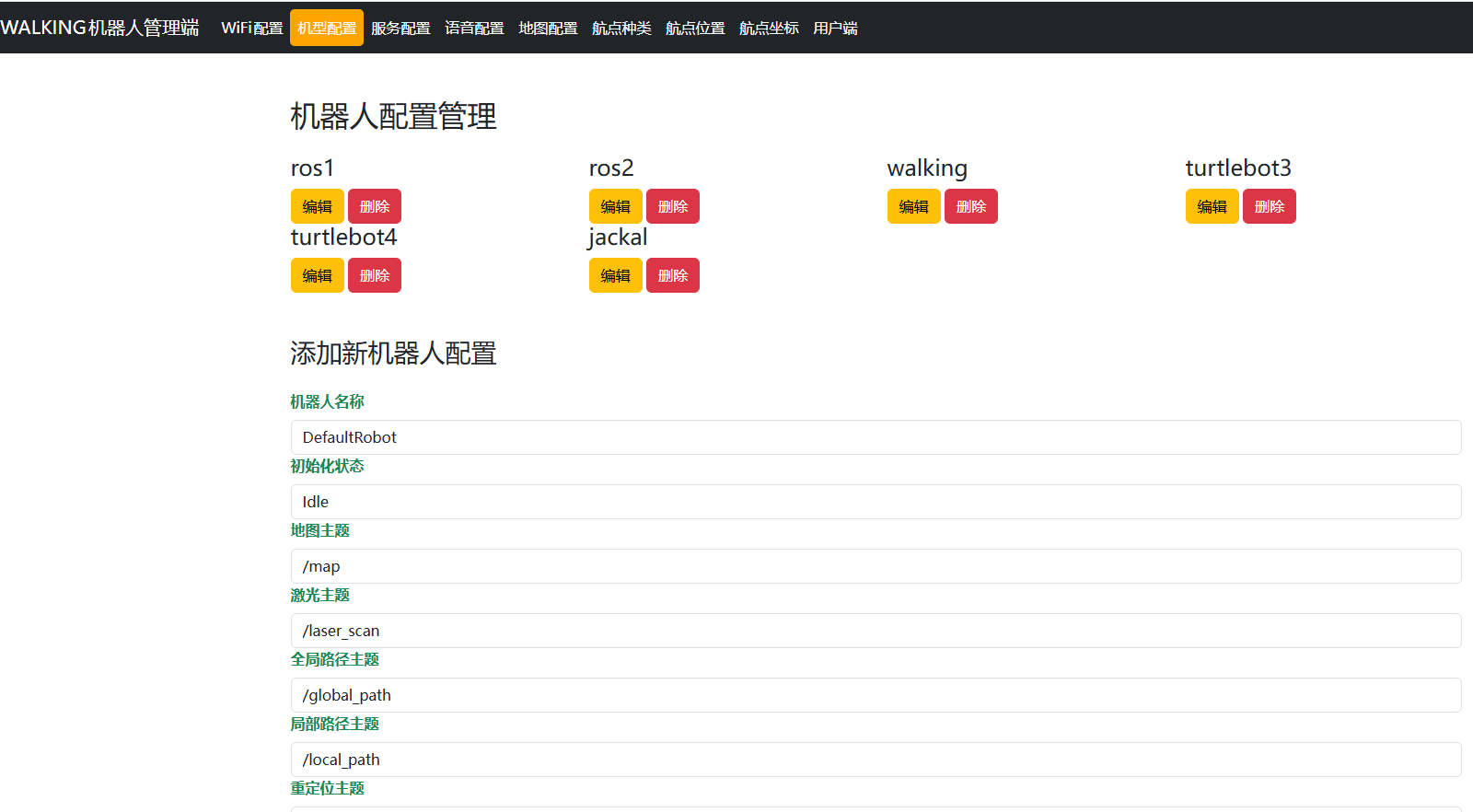
- 已有机型
ros1 - 基于ROS1的通用参数
ros2 - 基于ROS2的通用参数
walking - 基于walking机器人的参数
turtlebot3 - 基于turtlebot3机器人的参数
turtlebot4 - 基于turtlebot4机器人的参数
jackal - 基于jackal机器人的参数- 相关参数
机器人名称 - 具体的机器人名称
初始化状态 - 机器人分配的ID
地图主题 - 使用的地图话题,默认是/map
激光主题 - 使用的激光话题,默认是/laser_scan
全局路径主题 - 使用的全局路径话题,默认是/global_path
局部路径主题 - 使用的局部路径话题,默认是/local_path
重定位主题 - 使用的重定位话题,默认是/reloc
导航目标主题 - 使用发布目标点的话题,默认是/nav_goal
里程计主题 - 使用的里程数据的话题,默认是/odom
速度控制主题 - 速度控制的话题,默认是/speed_ctrl
电池主题 - 电池电量的话题,默认是/battery
最大 Vx - 最大的前行速度值,默认是1.0 米/秒
最大 Vy - 最大的横向速度值,默认是1.0米/秒
最大 Vw - 最大的旋转速度值,默认是0.5米/秒
地图框架名称 - 地图坐标系名称,默认是map
基础链接框架名称 - 基本坐标系名称,默认是base_link
图像端口 - 发布图像的端口,默认是8080
图像主题 - 发布图像的话题,默认是/camera/image_raw
图像宽度 - 图像的宽度,默认是640
图像高度 - 图像的高度,默认是480-
在手机下选择不同机器人,可以自动取得相应参数对应的值,并保持在手机内。