



















walking机器人入门教程-查看TF树和机器人模型

walking机器人入门教程-查看TF树和机器人模型
说明:
- 介绍如何查看walking机器人的TF树和机器人模型
相关设备
- walking机器人套件:采购地址
步骤:
- 启动底盘
ros2 launch walking_bringup robot.launch.py- 查看TF树
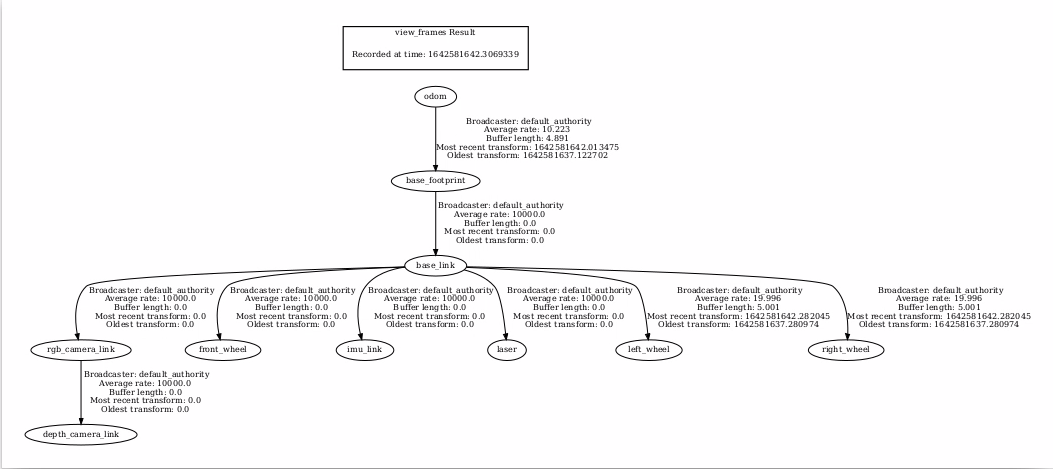
ros2 run tf2_tools view_frames- 保存TF树的PDF在当前目录下,名为frames.pdf,打开PDF
evince frames.pdf- 效果图:
- 查看机器人模型
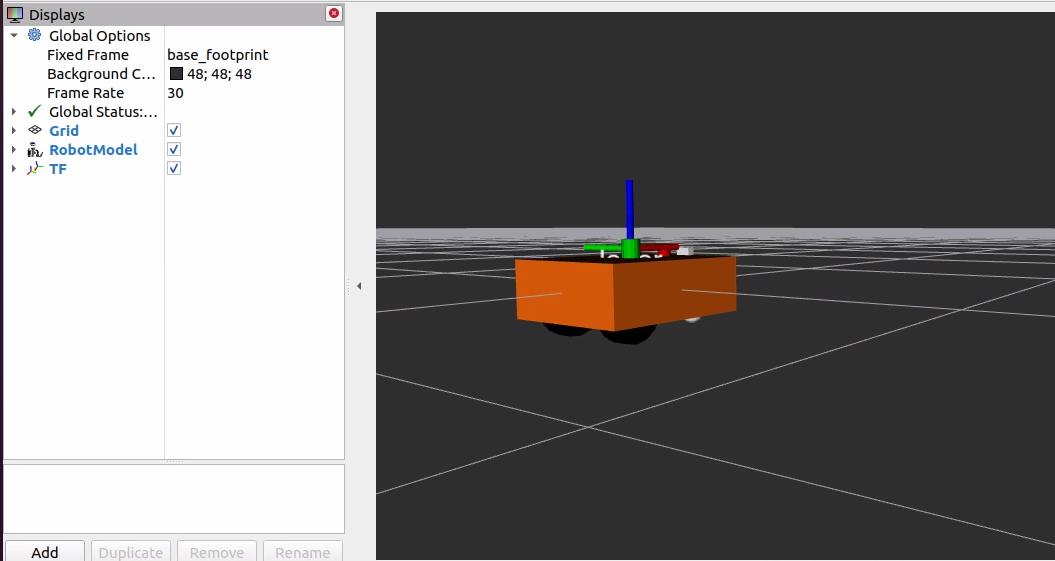
ros2 launch walking_description desc.launch.py-
自动打开rviz显示机器人模型
-
效果图:
演示视频
<iframe height=498 width=100% src="//player.bilibili.com/player.html?aid=684007955&bvid=BV1jU4y1m7FM&cid=720081878&page=1" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"> </iframe>