walking机器人入门教程-测试里程

walking机器人入门教程-测试里程
说明:
- 介绍如何测试walking机器人的里程
相关设备
- walking机器人套件:采购地址
步骤:
- 新开终端,启动底盘,显示里程
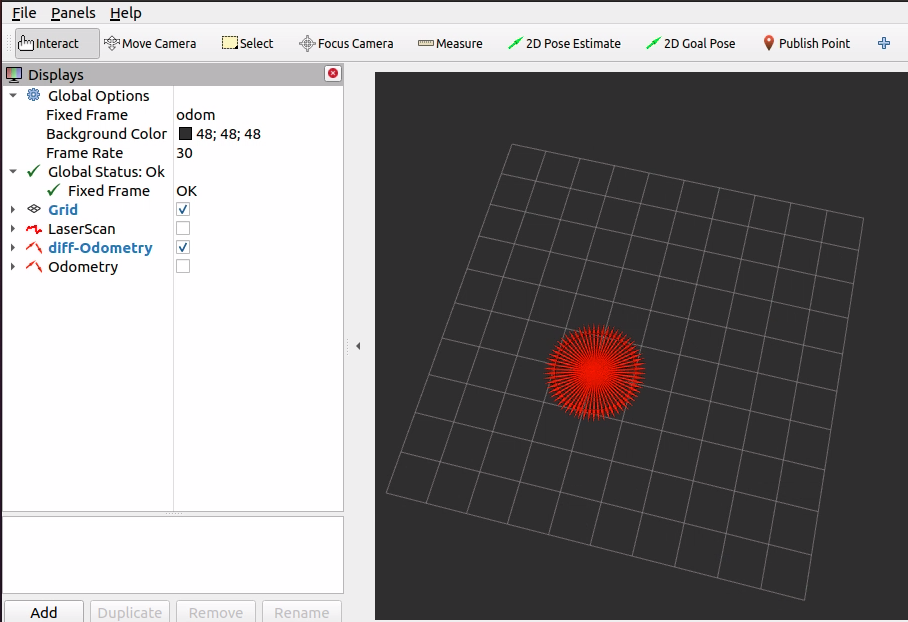
ros2 launch walking_tools test_odom_keyboard.launch.py #启动底盘,键盘控制- 打开后显示rviz,控制小车移动,可以看到里程显示
- 效果图:

 |
开源赋能教育,折腾点亮创新 |


















walking机器人入门教程-测试里程
说明:
相关设备
步骤:
ros2 launch walking_tools test_odom_keyboard.launch.py #启动底盘,键盘控制