



















walking机器人入门教程-测试深度数据转激光数据

walking机器人入门教程-测试深度数据转激光数据
说明:
- 介绍如何测试深度数据转激光数据
相关设备
- walking机器人套件:采购地址
步骤:
- 启动底盘
ros2 launch walking_bringup robot.launch.py- 启动键盘控制,移动小车
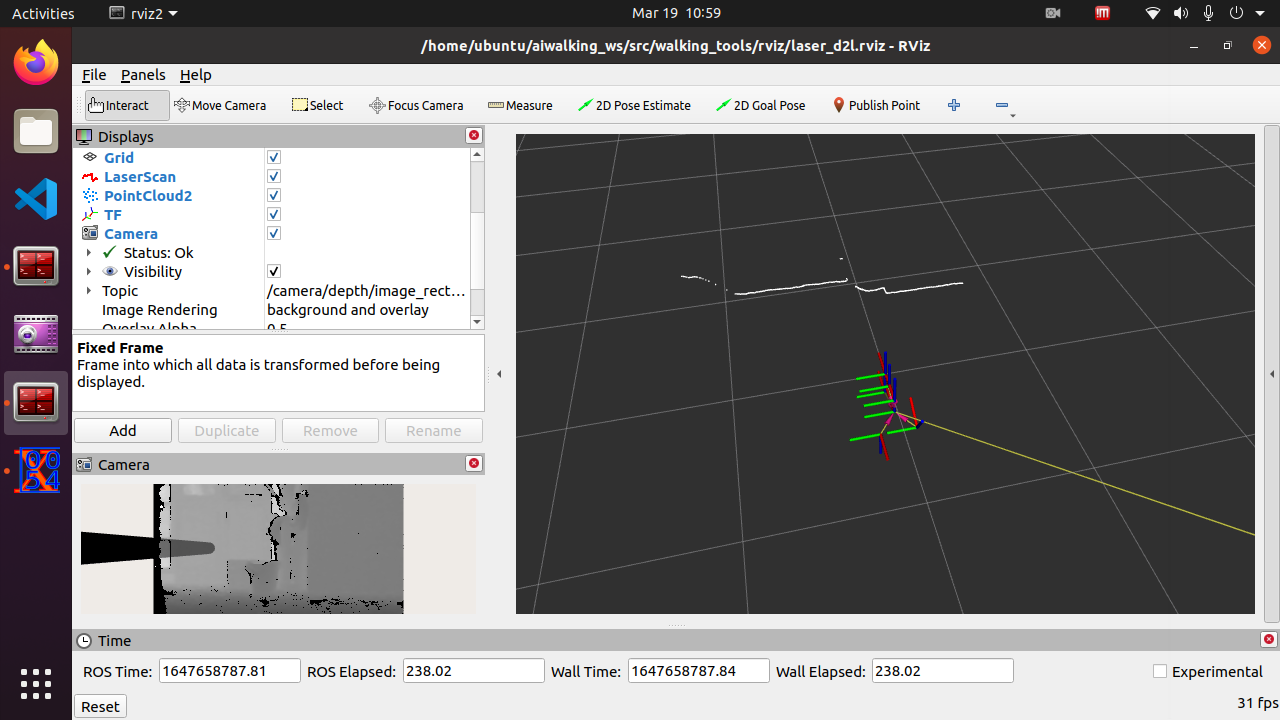
ros2 launch walking_teleop keyboard.launch.py- 启动深度相机并转化深度数据为激光数据
ros2 launch walking_tools test_d2l.launch.py- 效果图
演示视频
<iframe height=498 width=100% src="//player.bilibili.com/player.html?aid=938912056&bvid=BV1CT4y167Ve&cid=718323148&page=1" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"> </iframe>