



















walking机器人入门教程-测试语音阵列(选配)

walking机器人入门教程-测试respeaker语音阵列(选配)
说明:
- 介绍如何测试respeaker语音阵列
相关设备
- walking机器人套件:采购地址
步骤:
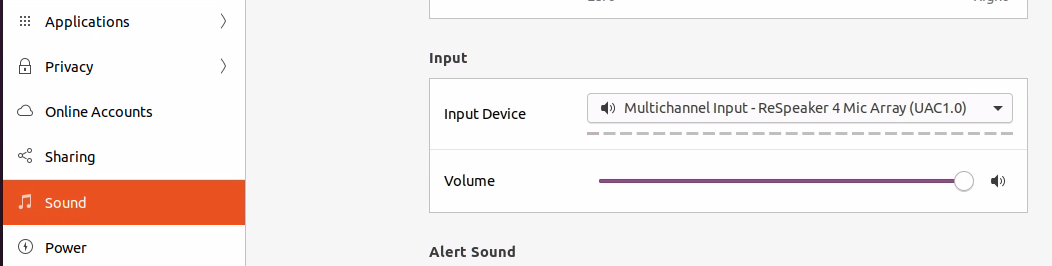
- 配置ubuntu使用语音阵列作为输入设备
- 右上角点击下拉选择->setting->sound->input 选择respeaker语音阵列
- 新开终端,启动respeaker
ros2 launch walking_voice respeaker.launch.py- 在机器人的四角发出声音,respeaker能判断那个方向值
- 新开终端,输出方位值
$ ros2 topic echo /respeaker/doa
data: 317
---
data: 317
---
data: 317
---
data: 317
---
data: 317演示视频
<iframe height=498 width=100% src="//player.bilibili.com/player.html?aid=341923375&bvid=BV1k94y1U7qj&cid=729964110&page=1" scrolling="no" border="0" frameborder="no" framespacing="0" allowfullscreen="true"> </iframe>