



















LeRobot-LeKiwi入门教程-校准机械臂
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
说明:
-
介绍如何校准机械臂
-
需要校准主臂和从臂,车轮电机无需校准
-
注意从臂与主臂的校准动作
步骤:
校准从臂:
- 加载lerobot环境
conda activate lerobot- 注意:校准从臂前,确保删除之前的校准文件main_follower.json,以防止旧数据干扰新的校准过程
cd ~/lerobot/.cache/calibration/lekiwi
rm main_follower.json- 在树莓派上,校准从臂(follower arm),每做好一个姿势,就按回车键。将从臂按顺序移动到以下位置
cd ~/lerobot
python lerobot/scripts/control_robot.py \
--robot.type=lekiwi \
--robot.cameras='{}' \
--control.type=calibrate \
--control.arms='["main_follower"]'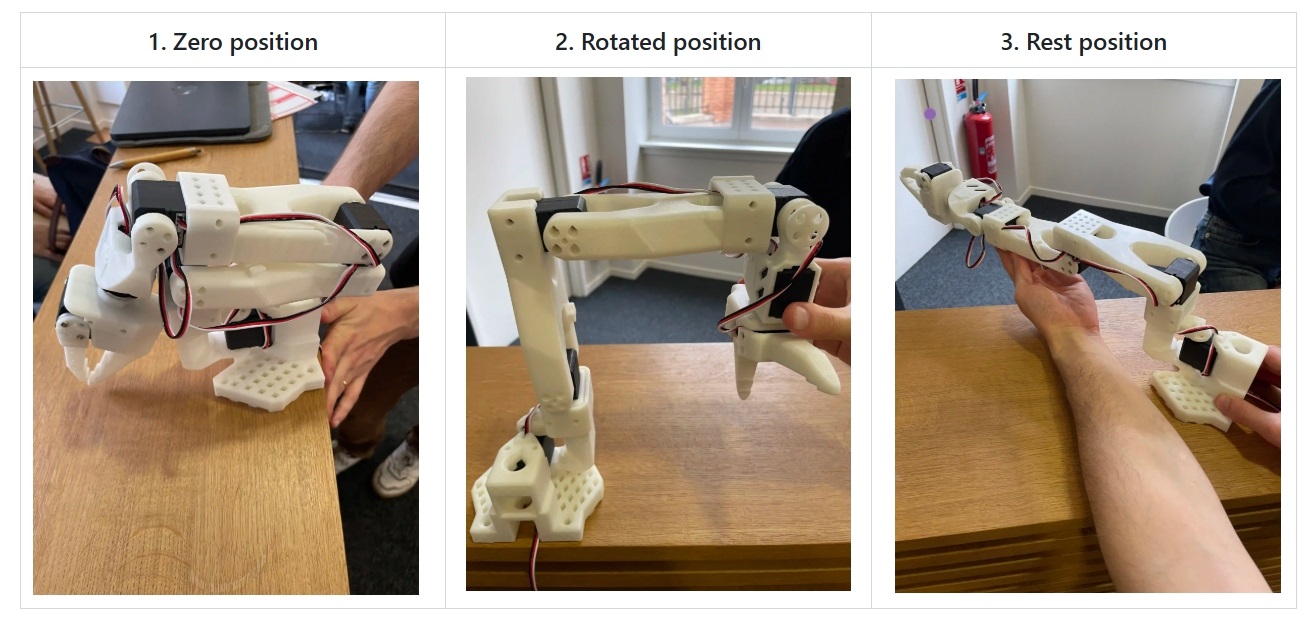
- 校准生成的文件内容
{"homing_offset": [-2014, 172, -4067, -1353, 2002, -2175, -1023, 3069, 3071], "drive_mode": [0, 1, 0, 0, 1, 0, 0, 1, 1], "start_pos": [2063, 204, 4055, 1362, 2042, 2047, 2046, 2051, 2057], "end_pos": [3038, 852, 5091, 2377, -978, 3199, 2047, -2045, -2047], "calib_mode": ["DEGREE", "DEGREE", "DEGREE", "DEGREE", "DEGREE", "LINEAR", "DEGREE", "DEGREE", "DEGREE"], "motor_names": ["shoulder_pan", "shoulder_lift", "elbow_flex", "wrist_flex", "wrist_roll", "gripper", "left_wheel", "back_wheel", "right_wheel"]}校准主臂:
- 注意:校准主臂前,确保删除之前的校准文件main_follower.json,以防止旧数据干扰新的校准过程
cd ~/lerobot/.cache/calibration/lekiwi
rm main_leader.json- 在虚拟机PC,校准主臂(leader arm),每做好一个姿势,就按回车键。将主臂按顺序移动到以下位置
cd ~/lerobot
python lerobot/scripts/control_robot.py \
--robot.type=lekiwi \
--robot.cameras='{}' \
--control.type=calibrate \
--control.arms='["main_leader"]'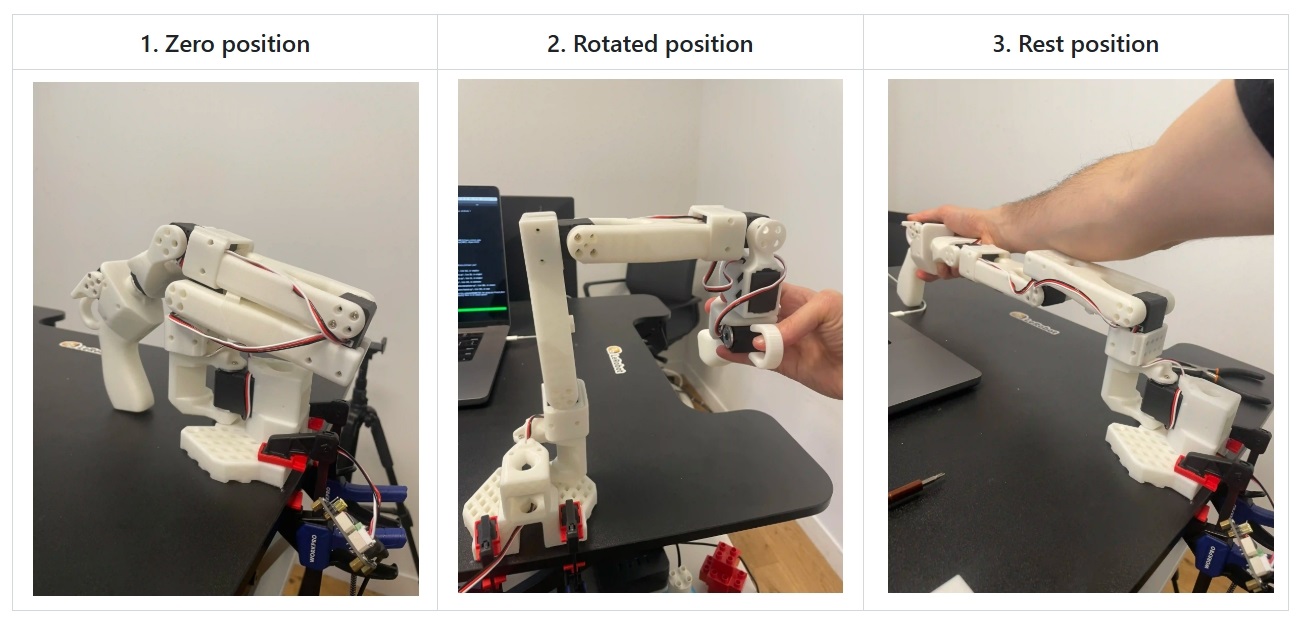
- 校准生成的文件内容
{"homing_offset": [-2001, 3096, -918, -2191, 2021, -2178], "drive_mode": [0, 1, 0, 0, 1, 0], "start_pos": [1991, 3141, 974, 1976, 2007, 2043], "end_pos": [3025, -2072, 1942, 3215, -997, 3202], "calib_mode": ["DEGREE", "DEGREE", "DEGREE", "DEGREE", "DEGREE", "LINEAR"], "motor_names": ["shoulder_pan", "shoulder_lift", "elbow_flex", "wrist_flex", "wrist_roll", "gripper"]}纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号