



















LeRobot-LeKiwi入门教程-控制机械臂和车轮移动
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
说明:
- 介绍如何控制LeRobot-LeKiwi机械臂和车轮移动
步骤:
在树莓派上运行(从臂):
- 加权限
sudo chmod 777 /dev/ttyACM0- 加载lerobot环境
conda activate lerobot- 进入目录
cd ~/lerobot- ssh远程操作树莓派,运行脚本、
python lerobot/scripts/control_robot.py \
--robot.type=lekiwi \
--control.type=remote_robot- 输出的内容如下
pynput is available - enabling local keyboard listener.
[INFO] Loaded calibration from .cache/calibration/lekiwi/main_follower.json
[INFO] Applied calibration for follower arm.
Motors set to velocity mode.
LeKiwi robot server started. Waiting for commands...在PC虚拟机上运行(主臂):
- 加权限
sudo chmod 777 /dev/ttyACM0- 加载lerobot环境
conda activate lerobot- 进入目录
cd ~/lerobot- 运行脚本
python lerobot/scripts/control_robot.py \
--robot.type=lekiwi \
--control.type=teleoperate \
--control.fps=30- 输出的内容图下
INFO 2025-05-23 16:15:08 rol_utils.py:82 dt:33.44 (29.9hz)
INFO 2025-05-23 16:15:08 rol_utils.py:82 dt:33.42 (29.9hz)
INFO 2025-05-23 16:15:08 rol_utils.py:82 dt:33.44 (29.9hz)
INFO 2025-05-23 16:15:08 rol_utils.py:82 dt:33.49 (29.9hz)
INFO 2025-05-23 16:15:08 rol_utils.py:82 dt:33.46 (29.9hz)
INFO 2025-05-23 16:15:09 rol_utils.py:82 dt:33.83 (29.6hz)
INFO 2025-05-23 16:15:09 rol_utils.py:82 dt:33.54 (29.8hz)
INFO 2025-05-23 16:15:09 rol_utils.py:82 dt:33.51 (29.8hz)
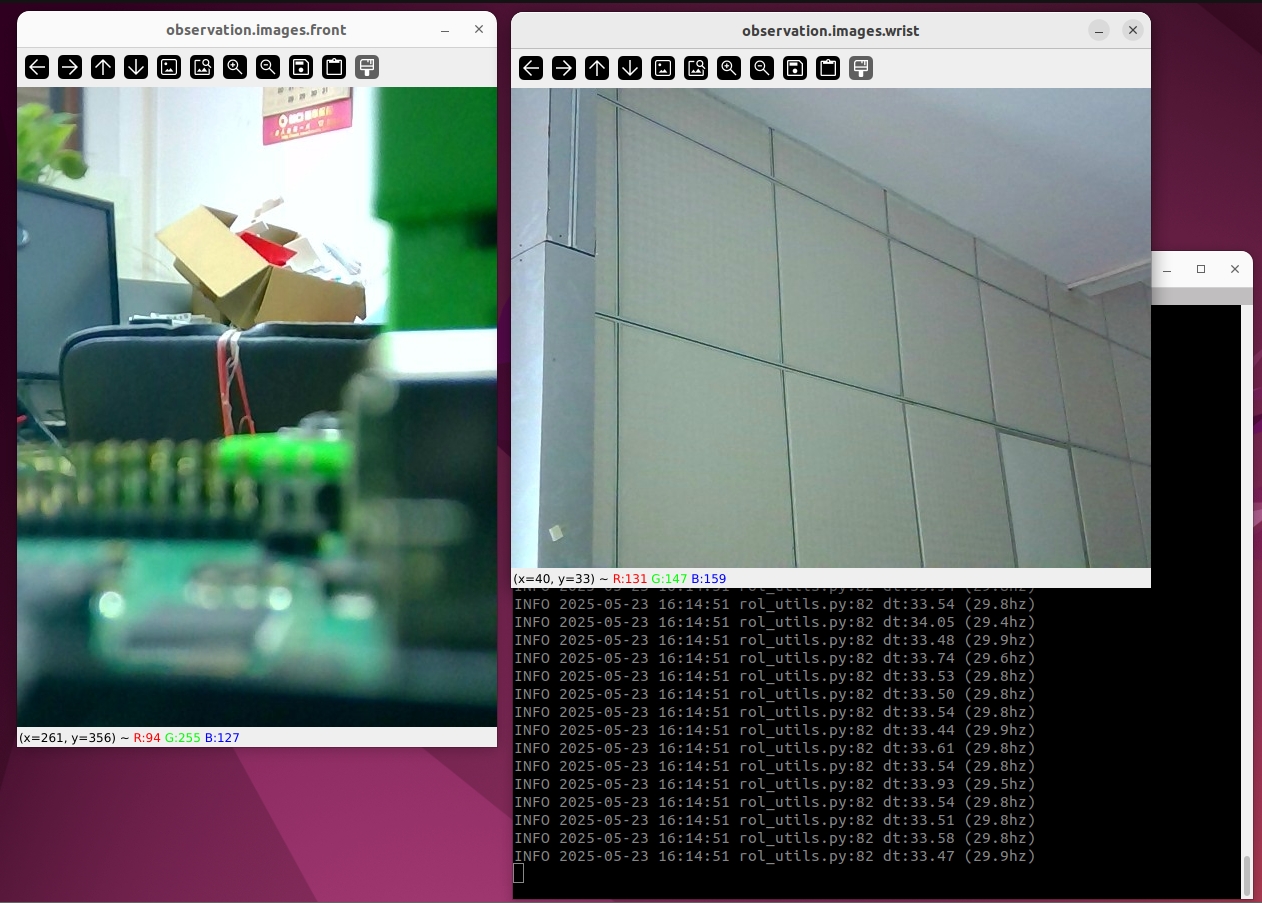
INFO 2025-05-23 16:15:09 rol_utils.py:82 dt:33.55 (29.8hz)- 会弹出两个相机内容的窗口observation.Images.front 和 observation.images.wrist
- 点击任何一个窗口,控制车轮移动,
w:向前
s:向后
a:向左
d:向右
z:左转
x:右转
r:提高速度
f:降低速度纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号