



















MoveIt!入门教程-在rviz中为PR2增加场景物体
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
MoveIt!入门教程-在rviz中为PR2下增加场景物体
说明
- 介绍在moveit_rviz中为PR2添加场景物体
步骤
- 启动demo.launch文件和配置插件
$ roslaunch pr2_moveit_config demo.launch- 编写场景物体文件
$ mkdir ~/pr2_scenes
$ vim ~/pr2_scenes/pr2_pillar.scene- 输入内容:
pillar
* pillar
1
box
0.2 0.2 2
0.6 -0.05 1
0 0 0 1
0 0 0 0
.-
格式描述:
- 0.2 0.2 2 分别是长,宽,高
- 0.6 -0.05 1 分别是离机器人远近,左右,高低(地面)
-
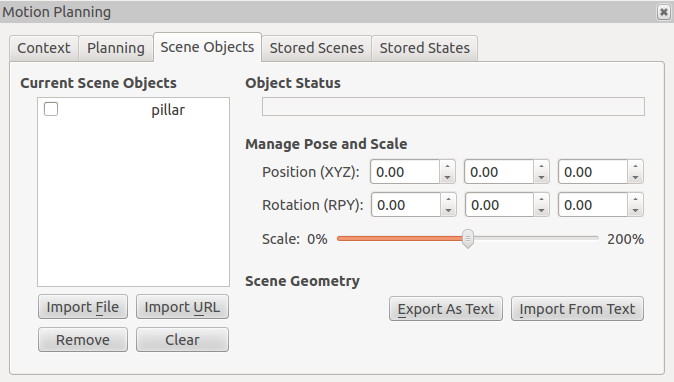
导入场景物体
-
在 Motion Planning下,选择Scene Object ,点击右下角import from text
-
上传完,在界面立刻就能显示新添加的物体
-
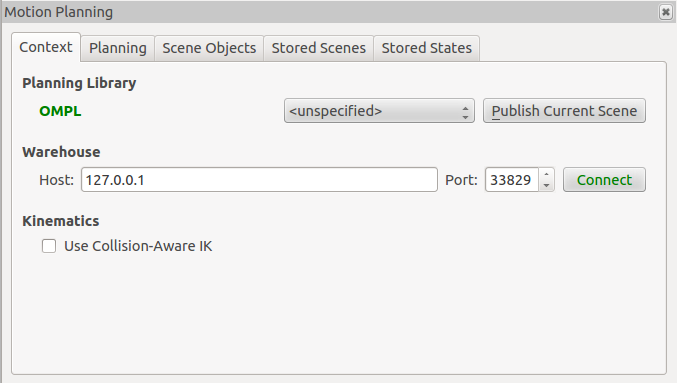
注意:你需要更新场景,这样才能让规划器启用你新的环境。
-
方法:在 Motion Planning下,切换到Context, 点击Planning Library区,后面的Publish Current Scene。
-
图示:
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号