



















Turbot中级教程-测试-kinect测试
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号
Turbot中级教程-测试-kinect测试
说明:
- 介绍如何测试kinect
操作步骤
- [Turbot] 启动底盘
$ roslaunch turbot_bringup minimal.launch- [Turbot] 执行启动freenect
$ roslaunch freenect_launch freenect-registered-xyzrgb.launch- [Remote PC] 监听是否获取到图像数据
$ rostopic hz /camera/rgb/image_color- [Remote PC] 执行显示图像
$ rosrun turbot_tools test_kinect_color- 效果:

- [Remote PC] 执行显示深度图
$ rosrun turbot_tools test_kinect_depth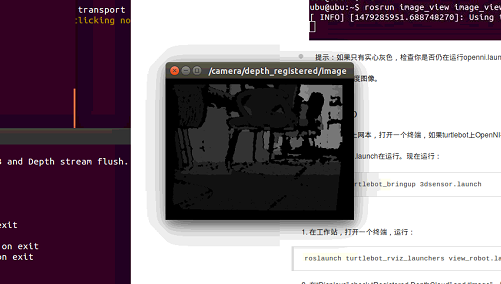
纠错,疑问,交流: 请进入讨论区或 请点击进入页面,扫码加入微信群或Q群进行交流
获取最新文章: 扫一扫加入“创客智造”公众号